


在实际应用中要求机械臂具有较高的绝对定位精度。机械臂出厂时已进行了出厂校准设置(400,0,0,0),用户可直接使用机械臂。如果更换机械臂的电机、减速器等传动部件或编码器电池等零部件,或者与工件发生碰撞等情况下,机械臂的出厂校准位置发生变化,此时需重新进行出厂校准设置。机械臂以左右手运行过程中,对J2轴精度要求较高,所以出厂校准后,还需进行对J2轴标定,以提高绝对定位精度。
正常情况下,机械臂以左右手方向切换至同一点,切换前后J2轴关节坐标为轴对称。若切换前后J2轴关节坐标变为非对称,则导致机械臂无法以左右手方向到达同一点,绝对定位精度降低。此时需通过补充J2轴关节角度使左右手切换前后关节坐标变为对称,以提高绝对定位精度。
前提条件
Dobot M1已上电,且与PC机正常连接。
已连接Dobot M1和急停开关。
末端已安装夹笔套件。夹笔的尺寸需符合末端圆柱尺寸,请参见3.3 (可选)末端套件安装。
请自行准备A4纸张,并用画一个小黑点记为标定参考点,如图 7.22所示。
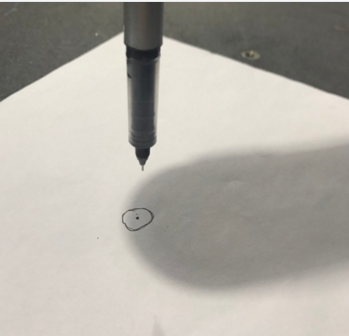
图 7.22 标定参考点
操作步骤
步骤 1 将准备好的A4纸张放置于机械臂工作空间范围内。
步骤 2 在“安装目录/DobotStudio/tools/Initialization”目录下单击“Initialization.exe”。
弹出DobotStudio小工具界面。
步骤 3 在DobotStudio小工具界面串口下拉菜单选择Dobot M1对应串口,单击“Connect”。
如果“Connect”图标变成“Disconnect”,则表示Dobot M1与PC机连接成功。
步骤 4 在“Calibration”页签单击Motor的 图标,使机械臂处于下使能的状态。
图标,使机械臂处于下使能的状态。
步骤 5 手动移动机械臂,将机械臂以右手方向移动并触碰到A4纸上的参考点,如图 7.23所示。
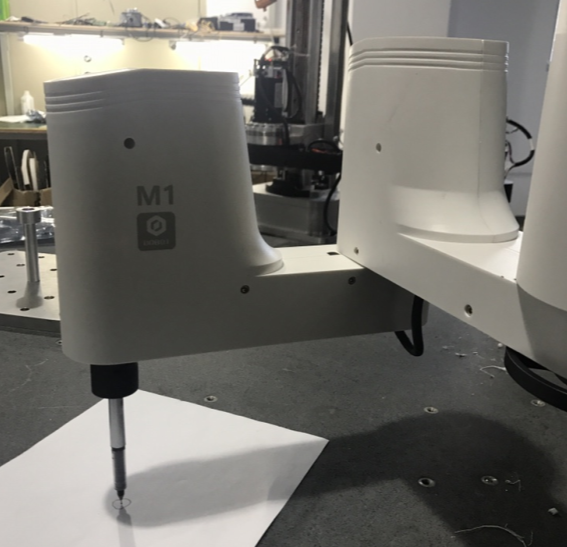
图 7.23 右手方向标定
步骤 6 在“Calibration”界面单击“P1”,将步骤 5机械臂所在的位置保存,此时“P1”显示右手方向J2轴的坐标,如图 7.24所示。
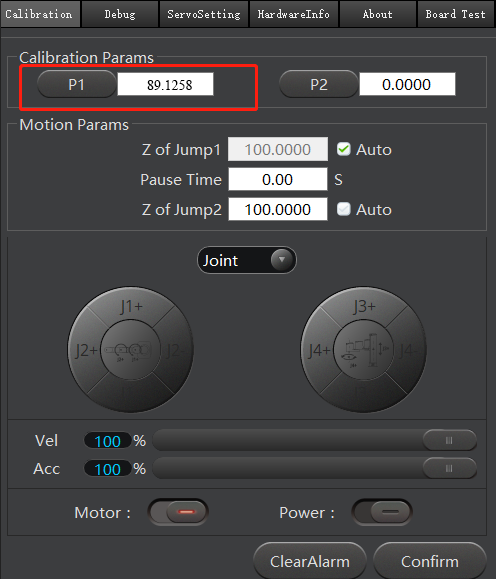
图 7.24 保存右手方向J2轴的坐标
步骤 7 将机械臂抬升一定高度,然后移动机械臂,将机械臂以左手方向移动至步骤 5中相同的位置,如图 7.25所示。

图 7.25 左手方向标定
步骤 8 在“Calibration”界面单击“P2”,将步骤 7机械臂所在的位置保存,此时“P2”显示左手方向J2轴的坐标,如图 7.26所示。
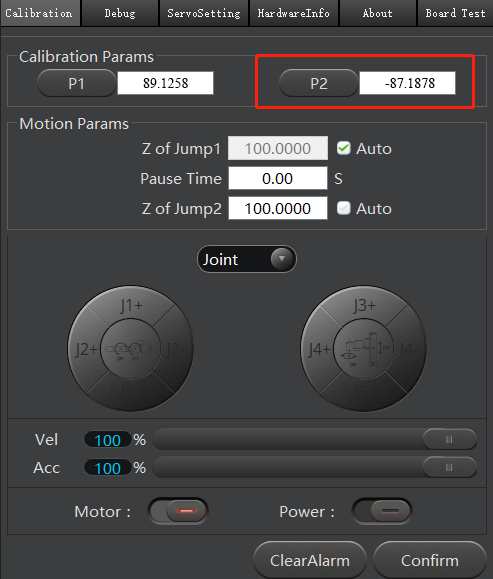
图 7.26 保存左手方向J2轴的坐标
步骤 9 在“Calibration”界面单击Motor的 图标,使机械臂处于使能状态。
图标,使机械臂处于使能状态。
注意
保存P1、P2点后一定要将机械臂处于使能状态后再单击“Confirm”。
步骤 10 单击“Confirm”,机械臂按照标定的点运动。机械臂最终会运行至坐标为(400,0,100,0)的位置。
危险
单击“Confirm”后机械臂开始运动,请勿进入机械臂工作范围内,否则给机械臂或自身带来伤害。