


编码器电池位于Dobot M1底座主控板或Dobot M1小臂。由于Dobot M1生产批次不同,编码器电池位置可能不同。
警告
如果编码器电池未串接保险丝,请联系技术支持工程师,我们将会给您提供带保险丝的编码器电池更换方案。
如果编码器电池未串接保险丝,在某些情况下(如违规拆机造成导线破损),可能引起电池充电,造成设备损坏甚至电池爆炸。
表 7.1 更换零部件清单
|
类型 |
名称 |
数量 |
备注 |
|
维护部件 |
带连接线的编码器电池 LS 14250 |
1 |
- |
|
扎带 |
1 |
需用户自行准备 | |
|
使用工具 |
2.5mm内六角扳手 |
1 |
- |
|
十字头螺丝刀 |
1 |
需用户自行准备 | |
|
剪钳 |
1 |
需用户自行准备 | |
|
绝缘胶带 |
1 |
需用户自行准备 |
更换电池后,旧电池请勿随意丢弃,请统一回收避免环境污染。
操作步骤
步骤 1 在Dobot M1底座接口板长按开关按钮约5秒后松开使Dobot M1断电,并拔下电源插头断开整个系统的电源。
步骤 2 拔除Dobot M1底座接口板与外部连接的所有线缆。
步骤 3 确认编码器电池位置,并取下原电池。
&说明
如果机械臂SN编号为“DT2118xxxxx”以前编号,则编码器电池位于机械臂底座。如果机械臂SN编号为“DT2118xxxxx”及以后编号,则编码器电池位于机械臂小臂。SN编号可在“M1Studio > 帮助 > 关于M1Studio”查看。
其中,xxxxx为随机序列编号,请根据实际情况替换。
若出现SN编号为“DT2118xxxxx”但编码器电池未安装在机械臂小臂的情况,则该编码器电池位于机械臂底座。
如果编码器电池位于机械臂底座,则执行以下步骤:
1. 利用2.5mm内六角扳手拆下Dobot M1底座接口板的四颗螺钉,如图 7.6所示。

图 7.6 底座接口板示意图
&说明
由于Dobot M1生产批次不同,Dobot M1底座接口板外观可能不同,但是电池更换方法不变。
2. 从Dobot M1底座移出主控板。
请注意轻轻移动主控板,防止主控板与机械臂之间连接线断开。
3. 取出原电池。
&说明
取出原电池后底座主控板上不再安装电池,请在小臂处安装待更换的电池,详细请参见步骤 4至步骤 9。
如果编码器电池带有保险丝,则用剪钳剪断固定原有电池的扎带,如图 7.7所示。将电池从电池盒中取出并断开电池与电池转接线的连接,如图 7.8所示。
取出电池后,将电池转接线的连接头用绝缘胶带包好,防止意外短接。
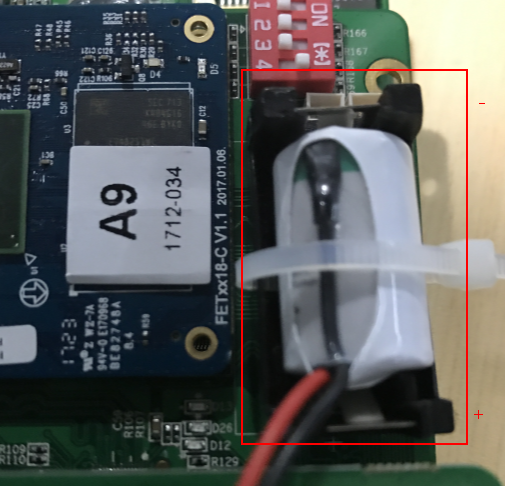
图 7.7 电池盒位置
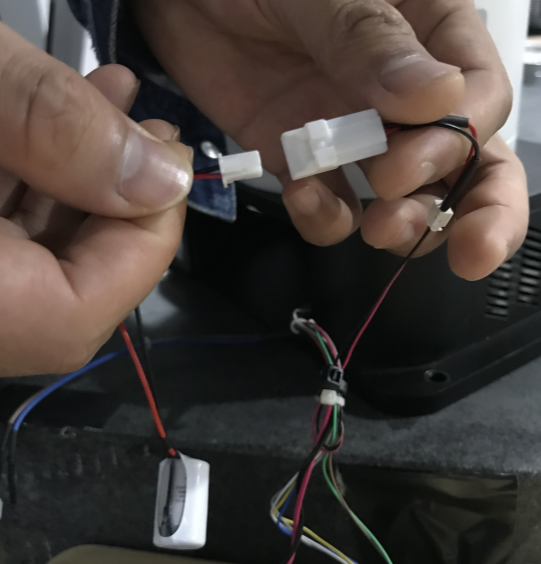
图 7.8 断开电池连接头与电池转接线
如果编码器电池未带保险丝,则取下电池盒盖,将原有电池取出。并拔除连接在电池盒上的总线电池连接头,如图 7.9所示。
取出电池后,将总线电池连接头用绝缘胶带包好,防止意外短接。
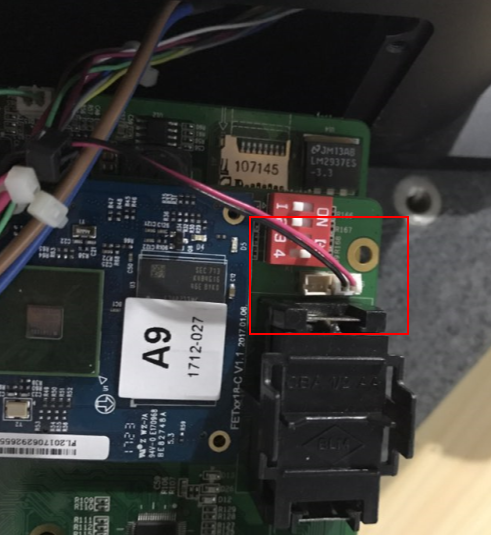
图 7.9 电池与机械臂连接示意图
4. 将主控板放入Dobot M1底座,重新安装接口板。
如果编码器电池位于Dobot M1小臂,则执行以下步骤:
1. 利用十字头螺丝刀和2.5mm内六角扳手拆下Dobot M1小臂外壳,如图 7.10所示。

图 7.10 Dobot M1小臂
2. 用剪钳剪断固定原有电池的扎带,如图 7.11所示。
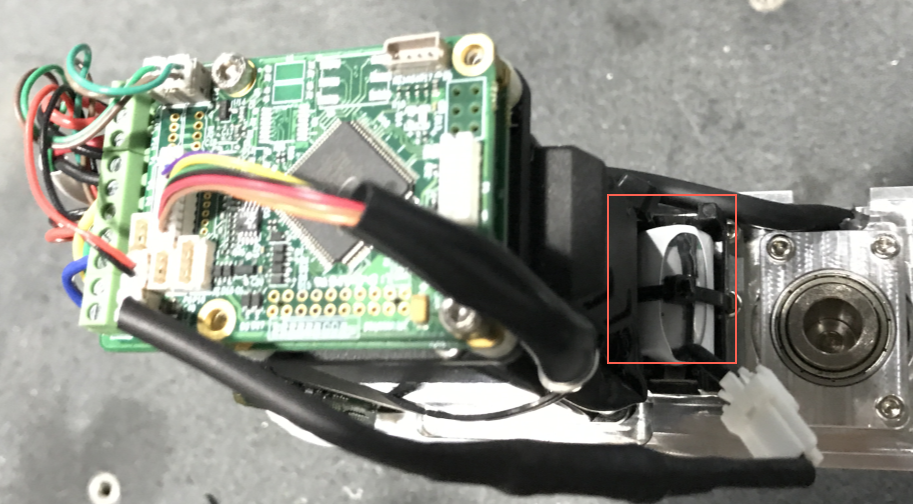
图 7.11 小臂电池盒位置
3. 将电池从电池盒中取出并断开电池与电池转接线的连接,如图 7.12所示。
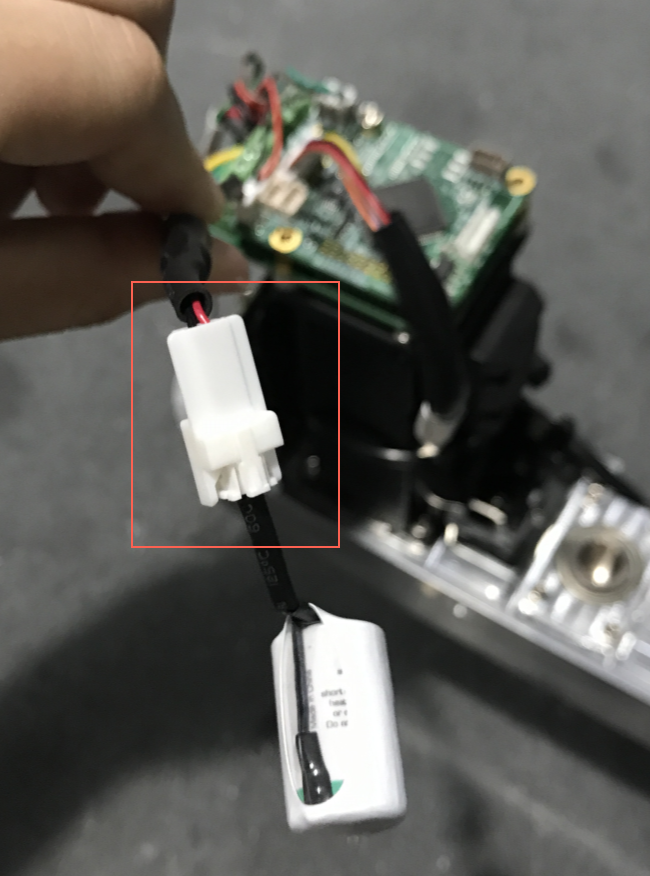
图 7.12 断开电池与电池转接线之间的连接
步骤 4 利用十字头螺丝刀和2.5mm内六角扳手拆下Dobot M1小臂外壳。如果已拆,可跳过此步骤。
步骤 5 将电池转接线一端接入驱动板上的电池接口,如图 7.13所示。如果已连接,可跳过此步骤。
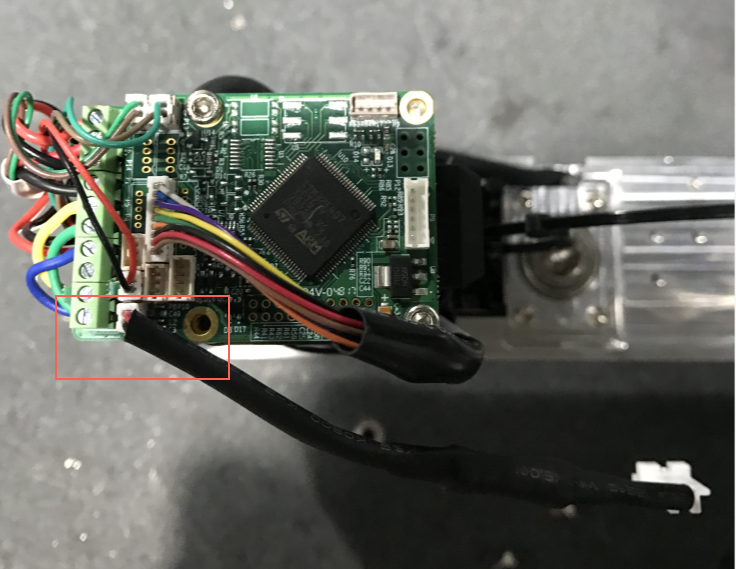
图 7.13 电池转接线接入电池接口
&说明
驱动板上有两个电池接口,如图 7.14红框所示。用户需将电池转接线接入驱动板上未被占用的电池接口。
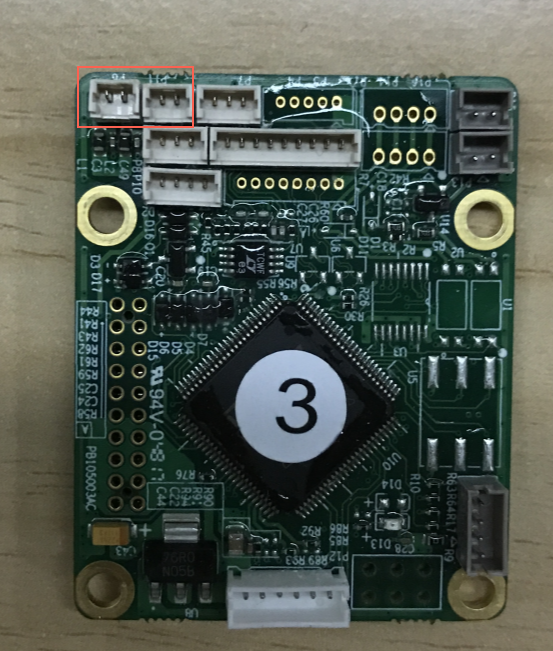
图 7.14 驱动板上的电池接口
步骤 6 将备用电池的连接头接入电池转接线另一端,如图 7.15所示。
图 7.15 连接电池与电池转接线
步骤 7 将扎带插入Dobot M1小臂的电池盒,用于固定电池,防止电池松动,如图 7.16所示。
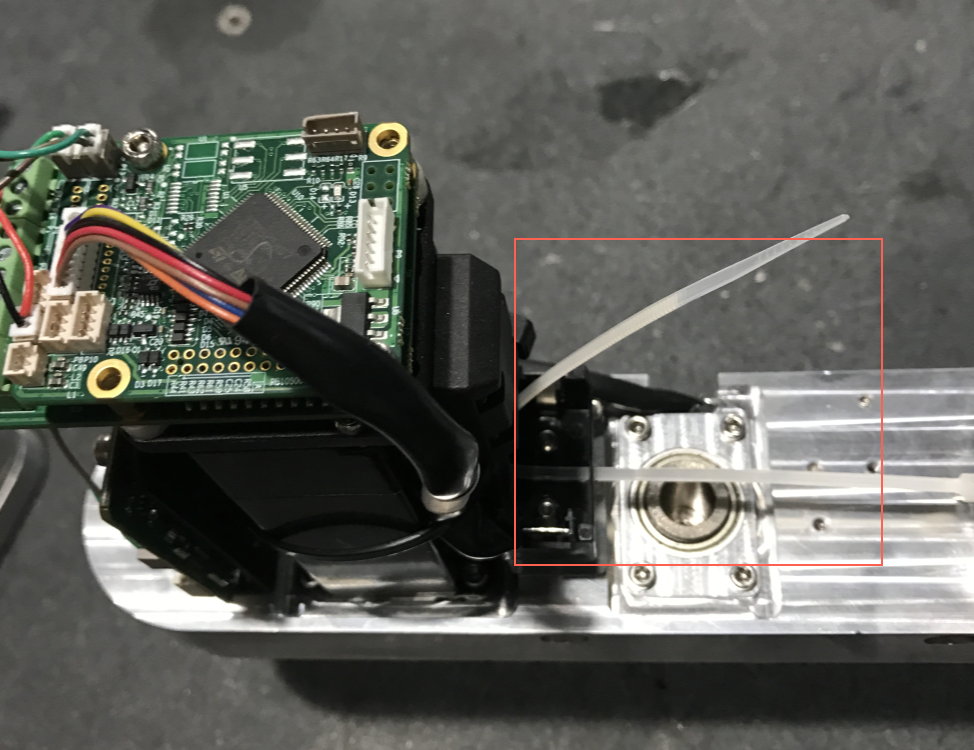
图 7.16 插入扎带
步骤 8 将备用电池按图 7.17放入电池盒并用扎带固定,并用剪钳剪断多余的扎带。
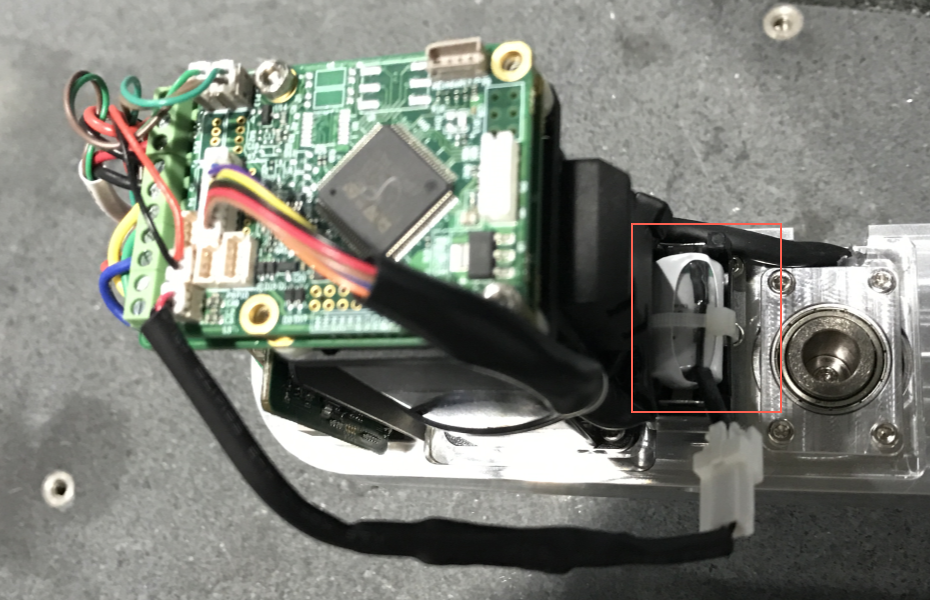
图 7.17 电池放入电池盒
步骤 10 重新连接Dobot M1所需线缆,并重新启动Dobot M1。
更换电池后,编码器上的位置数据丢失,需复位大臂、小臂、Z轴和R轴的编码器。
1. 在“安装目录/DobotStudio/tools/Initialization”目录下单击“Initialization.exe”。
弹出DobotStudio小工具界面。
2. 在DobotStudio小工具界面串口下拉菜单选择Dobot M1对应串口,单击“Connect”。
如果“Connect”图标变成“Disconnect”,则表示Dobot M1与PC机连接成功。
3. 在“Debug”页签分别单击“Reset Encoder1”、“Reset Encoder2”、“Reset Encoder3”和“Reset Encoder4”,复位J1、J2、J3和J4轴的编码器,如图 7.18所示。

图 7.18 复位编码器
复位编码器后不能在报警界面执行清除报警的操作,防止机械臂未按既定的路径运动,从而对外围设备造成干扰,损坏设备。且复位编码器后必须重新启动Dobot M1,否则编码器复位失败。
4. 重新启动Dobot M1。
5. 在DobotStudio小工具界面串口下拉菜单选择Dobot M1对应串口,单击“Connect”。
如果“Connect”图标变成“Disconnect”,则表示Dobot M1与PC机连接成功。
6. 在“Debug”页签检查编码器是否复位成功,可检查编码器数据“UserParam5”至“UserParam8”是否在“163790000”至“196548000”范围内,如图 7.19所示。如果是,则说明复位成功。
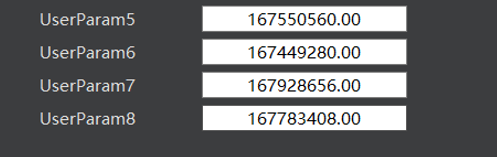
图 7.19 复位后编码器的值
7. 在“Calibration”页签单击Motor的 图标,使机械臂变为下使能的状态。
图标,使机械臂变为下使能的状态。
8. 手动移动机械臂,将机械臂大小臂摆直(移动机械臂大小臂关节,使大臂的中位线对准小臂外壳的美工槽,如图 7.20所示),位于Z轴底部,并垂直于机械臂底座向前,如图 7.21所示。
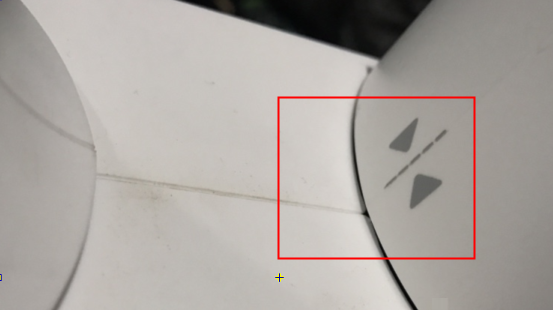
图 7.20 大小臂摆置标识

图 7.21 机械臂出厂校准位置
9. 单击“Calibration”页签Motor的 图标,使机械臂变为使能的状态。
图标,使机械臂变为使能的状态。
10. 在“Debug”页签单击“InitPos”,将机械臂恢复至出厂校准位置,此时机械臂坐标为(400,0,0,0)。
注意
恢复出厂校准位置后,会触发J3轴限位报警,同时机械臂底座红色指示灯常亮,此现象为正常情况。此时需在关节坐标系下点动“J3+”,使J3轴移动到10mm以上的位置后即可清除报警。
步骤 12 出厂校准位置恢复后,还需对J2轴进行标定,详细请参见7.3.2 标定。