


Dobot M1的坐标系可分为关节坐标系和笛卡尔坐标系,分别如图 2.3和图 2.4所示。
&说明
图 2.3所示的数据表示机械限位的最大运动范围。
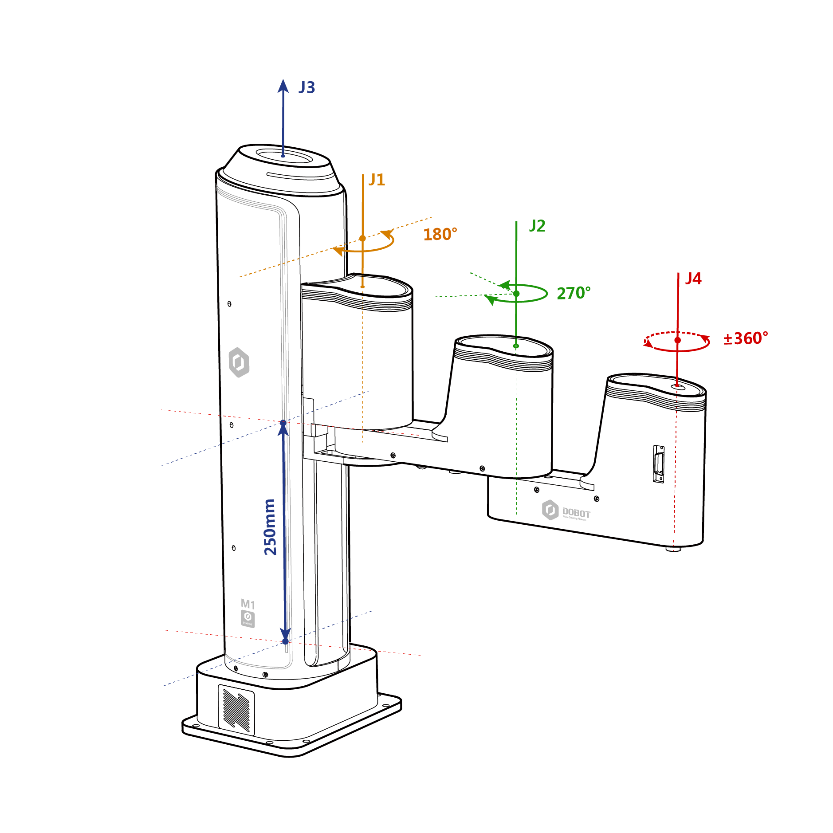
图 2.3 关节坐标系
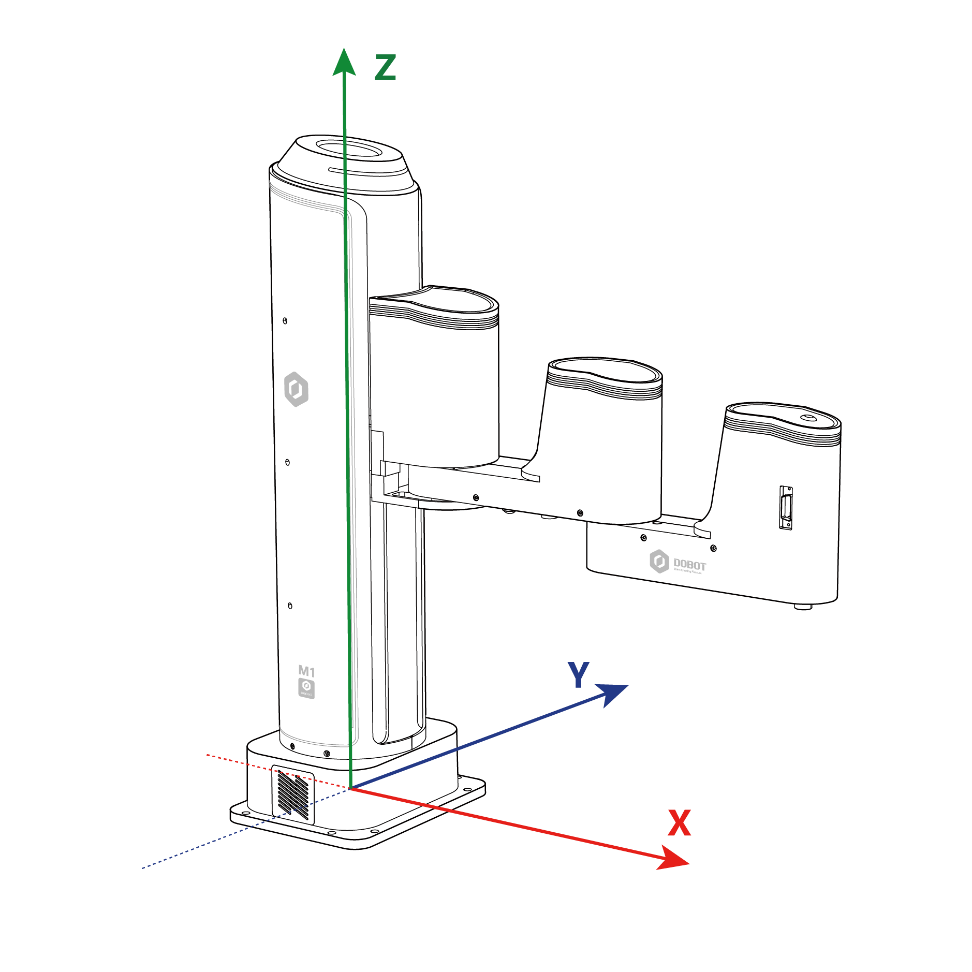
图 2.4 笛卡尔坐标系
关节坐标系:以各运动关节为参照确定的坐标系。
Dobot M1总共有四个关节:
J1、J2、J4关节为旋转关节,其轴线相互平行,在水平面内进行定位和定向,逆时针为正。
J3关节为移动关节,用于完成末端夹具在垂直平面的的运动,垂直向上为正。
笛卡尔坐标系:以机械臂底座为参照确定的坐标系。
坐标系原点为机械臂的大臂下垂到Z轴丝杠最底部时大臂电机轴线的圆心。
X轴方向垂直于固定底座向前。
Y轴方向垂直于固定底座向左。
Z轴符合右手定则,垂直向上为正方向。
R轴为末端中心相对于原点的姿态,逆时针为正。R轴坐标为J1、J2和J4轴的坐标之和。