


DB62扩展板如图 4.4所示,详细接口说明如表 4.9所示。
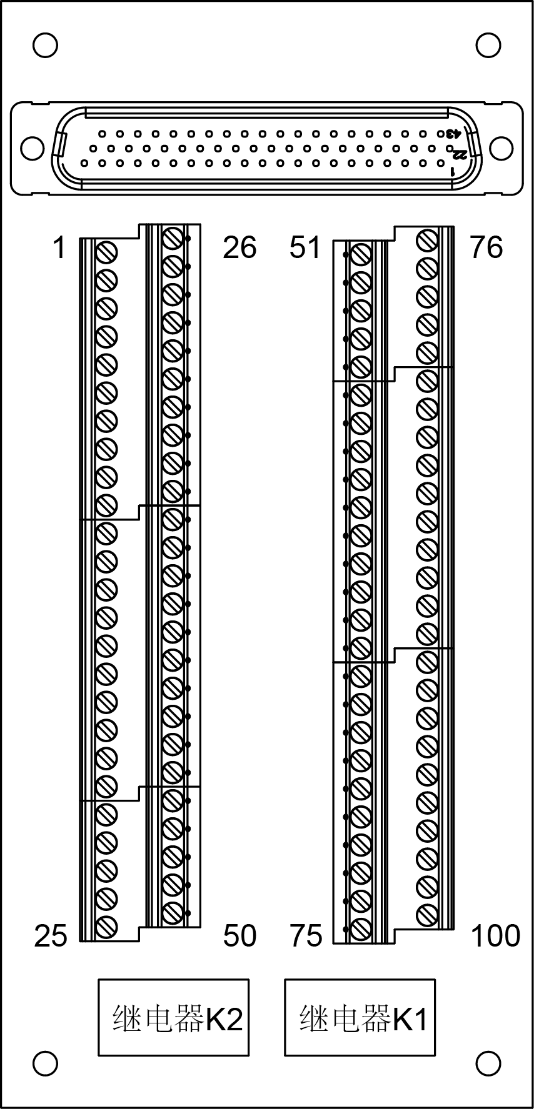
图 4.4 DB62外部扩展板
表 4.9 外部扩展板接口说明
|
引脚 |
名称 |
功能 |
电压/电流 |
|
1 |
EX_IN9(DIN9) |
数字信号输入 |
0V,24V/<100mA |
|
2 |
PGND |
逻辑电源负极 |
GND/5A |
|
3 |
EX_IN10(DIN10) |
复位信号 |
0V,24V/<100mA |
|
4 |
PGND |
逻辑电源负极 |
GND/5A |
|
5 |
EX_IN11(DIN11) |
外部I/O控制信号,即机械臂启动外部I/O控制功能 |
0V,24V/<100mA |
|
6 |
PGND |
逻辑电源负极 |
GND/5A |
|
7 |
EX_IN12(DIN12) |
继续信号 |
0V,24V/<100mA |
|
8 |
PGND |
逻辑电源负极 |
GND/5A |
|
9 |
EX_IN13(DIN13) |
暂停信号 |
0V,24V/<100mA |
|
10 |
PGND |
逻辑电源负极 |
GND/5A |
|
11 |
EX_IN14(DIN14) |
停止信号 触发该信号后,机械臂会停止脱机运行,但是外部I/O控制功能不会关闭,此时可通过M1Studio控制机械臂(Dobot模式)或再次触发EX_IN15运行脱机脚本 |
0V,24V/<100mA |
|
12 |
PGND |
逻辑电源负极 |
GND/5A |
|
13 |
EX_IN15(DIN15) |
启动信号,运行脱机脚本 触发该信号前,需先触发EX_IN11 |
0V,24V/<100mA |
|
14 |
PGND |
逻辑电源负极 |
GND/5A |
|
15 |
EX_IN16(DIN16) |
数字信号输入 |
0V,24V/<100mA |
|
16 |
PGND |
逻辑电源负极 |
GND/5A |
|
17 |
ON_OFF+ |
开机信号输入正极 |
0V~24V/<100mA |
|
18 |
GND |
模拟电源输入负极 |
GND/1A |
|
19 |
GND |
模拟电源输入负极 |
GND/1A |
|
20 |
GND |
模拟电源输入负极 |
GND/1A |
|
21 |
GND |
模拟电源输入负极 |
GND/1A |
|
22 |
NC2 |
继电器K2常闭 |
AC: 250V/5A DC:30V/5A |
|
23 |
NO2 |
继电器K2常开 |
AC: 250V/5A DC:30V/5A |
|
24 |
COM2 |
公共端 |
AC: 250V/5A DC:30V/5A |
|
25 |
屏蔽地 |
GND/5A | |
|
26 |
FPGA_OUT1(DOUT11) |
数字信号输出 |
0V,24V/2mA |
|
27 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
28 |
FPGA_OUT2(DOUT12) |
数字信号输出 |
0V,24V/2mA |
|
29 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
30 |
FPGA_OUT3(DOUT13) |
数字信号输出 |
0V,24V/2mA |
|
31 |
VCC_24V |
逻辑电源正极 |
0V,24V/2mA |
|
32 |
FPGA_OUT4(DOUT14) |
数字信号输出 |
0V,24V/2mA |
|
33 |
VCC_24V |
24V/3A | |
|
34 |
FPGA_OUT5(DOUT15) |
数字信号输出 |
0V,24V/2mA |
|
35 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
36 |
FPGA_DOUT6(DOUT16) |
数字信号输出 |
0V,24V/2mA |
|
37 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
38 |
DAC_OUT1 |
模拟信号输出,暂不支持 |
- |
|
39 |
GND |
模拟电源输入负极 |
GND/1A |
|
40 |
DAC_OUT2 |
模拟信号输出,暂不支持 |
- |
|
41 |
GND |
模拟电源输入负极 |
GND/1A |
|
42 |
ON_OFF- |
开机信号输入负极 |
0V~24V/<100mA |
|
43 |
IN_A/D1(AIN1) |
模拟信号输入 |
0V~10V/<100mA |
|
44 |
IN_A/D2(AIN2) |
模拟信号输入 |
0V~10V/<100mA |
|
45 |
IN_A/D3(AIN3) |
模拟信号输入 |
0V~10V/<100mA |
|
46 |
IN_A/D4(AIN4) |
模拟信号输入 |
0V~10V/<100mA |
|
47 |
EX_A1+ |
外部编码器1A相信号输入,暂不支持 |
- |
|
48 |
EX_A1- |
外部编码器1A反相信号输入,暂不支持 |
- |
|
49 |
EX_B1+ |
外部编码器1B相信号输入,暂不支持 |
- |
|
50 |
EX_B1- |
外部编码器1B反相信号输入,暂不支持 |
- |
|
51 |
EX_OUT1(DOUT1) |
数字信号输出 |
0V,24V/2mA |
|
52 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
53 |
EX_OUT2(DOUT2) |
数字信号输出 |
0V,24V/2mA |
|
54 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
55 |
EX_OUT3(DOUT3) |
数字信号输出 |
0V,24V/2mA |
|
56 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
57 |
EX_OUT4(DOUT4) |
数字信号输出 |
0V,24V/2mA |
|
58 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
59 |
EX_OUT5(DOUT5) |
数字信号输出 |
0V,24V/2mA |
|
60 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
61 |
EX_OUT6(DOUT6) |
数字信号输出 |
0V,24V/2mA |
|
62 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
63 |
EX_OUT7(DOUT7) |
运行状态信号 |
0V,24V/2mA |
|
64 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
65 |
EX_OUT8(DOUT8) |
报警信号 |
0V,24V/2mA |
|
66 |
逻辑电源正极 |
24V/3A | |
|
67 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
68 |
PGND |
逻辑电源负极 |
GND/5A |
|
69 |
CAN2_H |
CAN总线通信,暂不支持 |
- |
|
70 |
CAN2_L |
CAN总线通信,暂不支持 |
- |
|
71 |
VCC_5V |
逻辑电源正极 |
5V/2A |
|
72 |
EX_A2+ |
外部编码器2A相信号输入,暂不支持 |
- |
|
73 |
EX_A2- |
外部编码器2A反相信号输入,暂不支持 |
- |
|
74 |
EX_B2+ |
外部编码器2B相信号输入,暂不支持 |
- |
|
75 |
EX_B2- |
外部编码器2B反相信号输入,暂不支持 |
- |
|
76 |
EX_IN1(DIN1) |
数字信号输入 |
0V,24V/<100mA |
|
77 |
PGND |
逻辑电源负极 |
GND/5A |
|
78 |
EX_IN2(DIN2) |
数字信号输入 |
0V,24V/<100mA |
|
79 |
PGND |
逻辑电源负极 |
GND/5A |
|
80 |
EX_IN3(DIN3) |
数字信号输入 |
0V,24V/<100mA |
|
81 |
PGND |
逻辑电源负极 |
GND/5A |
|
82 |
EX_IN4(DIN4) |
数字信号输入 |
0V,24V/<100mA |
|
83 |
PGND |
逻辑电源负极 |
GND/5A |
|
84 |
EX_IN5(DIN5) |
数字信号输入 |
0V,24V/<100mA |
|
85 |
PGND |
逻辑电源负极 |
GND/5A |
|
86 |
EX_IN6(DIN6) |
数字信号输入 |
0V,24V/<100mA |
|
87 |
PGND |
逻辑电源负极 |
GND/5A |
|
88 |
EX_IN7(DIN7) |
数字信号输入 |
0V,24V/<100mA |
|
89 |
PGND |
逻辑电源负极 |
GND/5A |
|
90 |
EX_IN8(DIN8) |
数字信号输入 |
0V,24V/<100mA |
|
91 |
PGND |
逻辑电源负极 |
GND/5A |
|
92 |
PGND |
逻辑电源负极 |
GND/5A |
|
93 |
VCC_24V |
逻辑电源正极 |
24V/3A |
|
94 |
RS-485_A |
RS485A总线通信,暂不支持 |
- |
|
95 |
RS-485_B |
RS485B总线通信,暂不支持 |
- |
|
96 |
GND |
模拟电源输入负极 |
GND/1A |
|
97 |
NC1 |
继电器K1常闭 |
AC: 250V/5A DC:30V/5A |
|
98 |
NO1 |
继电器K1常开 |
AC: 250V/5A DC:30V/5A |
|
99 |
COM1 |
公共端 |
AC: 250V/5A DC:30V/5A |
|
100 |
GND_EMC |
屏蔽地 |
GND/5A |
注意
DOUT9和DOUT10分别控制继电器K1和继电器K2,但DOUT9和DOUT10接口为内部封装接口。用户使用继电器时,如供电等场景,可将外部扩展板连接至Dobot M1后,直接使用外部扩展板上的COM、NC、NO接口即可。若需测试继电器K1和继电器K2,可将该外部扩展板连接至Dobot M1后,在“M1Studio > I/O助手”界面调试“OUT09”和“OUT10”,详细请参见6.10.6继电器接线示例。
机械臂所有输入输出接口只能用于信号控制,无法对外供电。如需要供电可使用外部扩展板上集成的继电器来控制供电。以继电器K1为例,其线路图如图 4.5所示。

图 4.5 继电器线路图