


Dobot M1已上电,且与PC机正常连接。
已连接Dobot M1和急停开关。
应用场景
用户可通过脚本控制机械臂的运行,Dobot M1提供丰富的API接口,如速度/加速度设置、运动模式设置以及I/O配置等,采用Python脚本语言开发,可供用户二次开发时调用。
Dobot M1支持的API接口以及详细的功能描述请参见配套版本的《Dobot API接口文档》,下载路径为http://cn.dobot.cc/downloadcenter/dobot-m1.html#most-download。
步骤 1 在M1Studio界面选择“脚本控制”。
进入“脚本控制”界面。
步骤 2 编写控制脚本。
用户可在“脚本控制”左侧界面双击需调用的接口,此时会在脚本文件窗口显示相应的接口,如图 6.14所示。其接口的参数设置方法可单击“脚本控制”左侧界面对应接口的 查看。脚本编程示例可参考“安装目录/M1Studio/config/ststore/Example.script”。
查看。脚本编程示例可参考“安装目录/M1Studio/config/ststore/Example.script”。
注意
使用脚本编程时,如果使用运动指令,则需在每一条运动指令前加上方向指令,表示机械臂的运动方向。
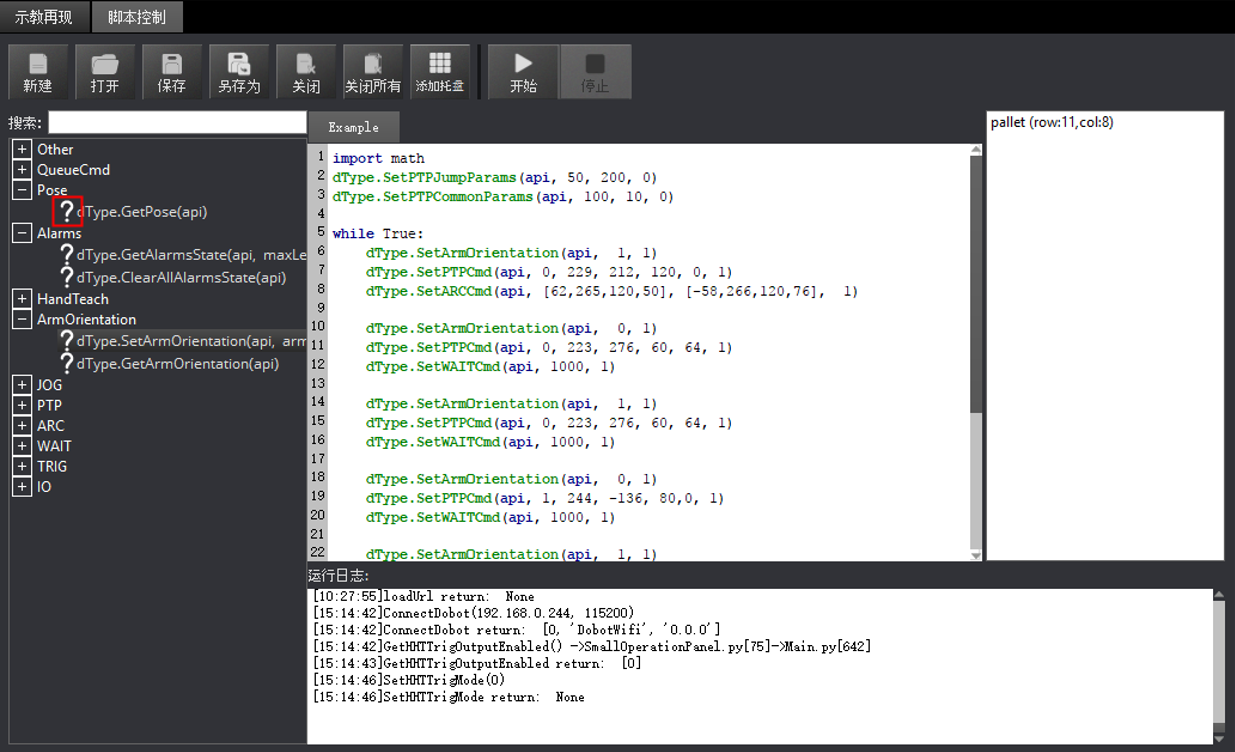
图 6.14 脚本控制示意图
步骤 3 在“脚本控制”界面单击“保存”。
弹出保存的对话框。
步骤 4 输入脚本的名称和保存路径。脚本的默认保存路径为“安装目录/M1Studio/config/ststore”,用户可根据实际情况替换。
步骤 5 在“脚本控制”界面单击“开始”,机械臂会根据编写的脚本运动。
在“脚本控制”界面下方会实时打印运行日志,可供用户查看。