


用户还可在“示教再现”界面执行如下操作:
在“示教再现”界面勾选“开启手持示教”,此时会屏蔽“增加运动指令”按钮,用户点动机械臂或用手移动机械臂至某一点后可直接按住机械臂大臂下方的开关进行存点,详细请参见5.3.5.2 存点再现功能调试。
在“示教再现”界面设置存点回放的循环次数,最大值为9999,也可直接勾选“无限循环”,使机械臂根据存点列表处于无限循环回放的状态,如图 6.8所示。

图 6.8 存点列表回放的循环次数设置示意图
存点前,可在“示教再现”界面右侧对新增存点的位置进行选择,如图 6.9所示。
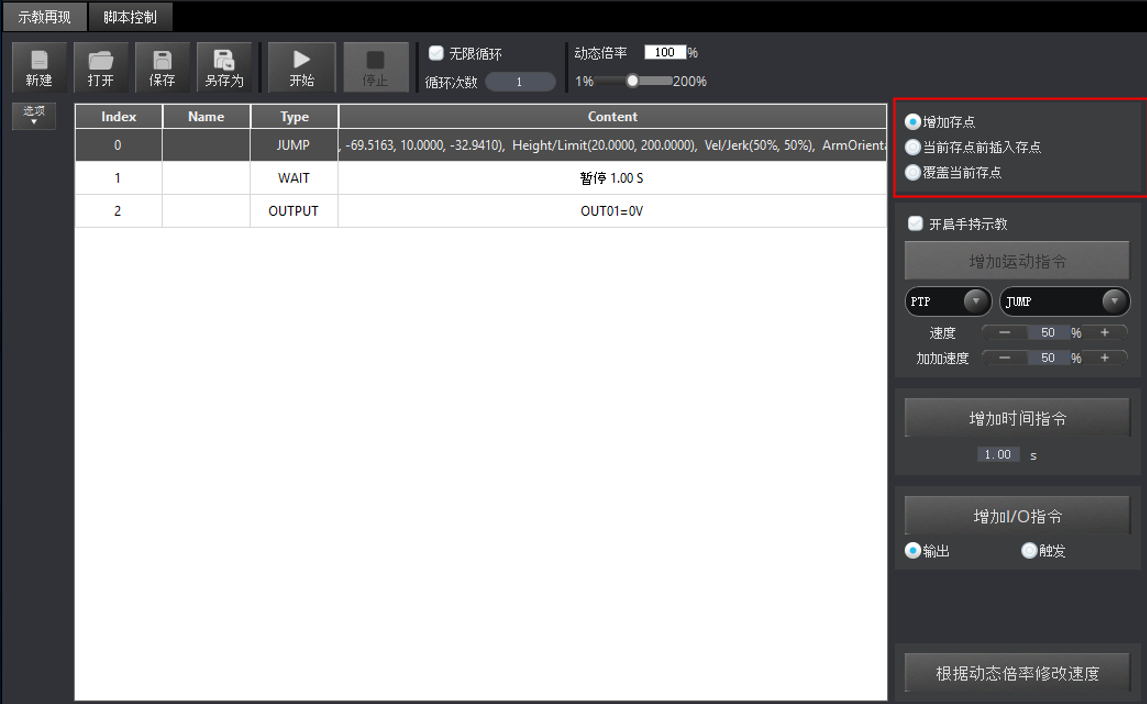
图 6.9 覆盖当前存点示意图
存点位置详细说明如表 6.4所示。
表 6.4 存点位置说明
|
存点位置 |
说明 |
|
增加存点 |
新增存点,即在最后一个存点后插入存点 |
|
当前存点前插入存点 |
在当前存点前插入存点 |
|
覆盖当前存点 |
覆盖当前存点 |
在“示教再现”左侧界面的存点列表选中某一条存点信息,双击修改存点信息,存点信息如图 6.10所示。可修改的参数如表 6.5所示。
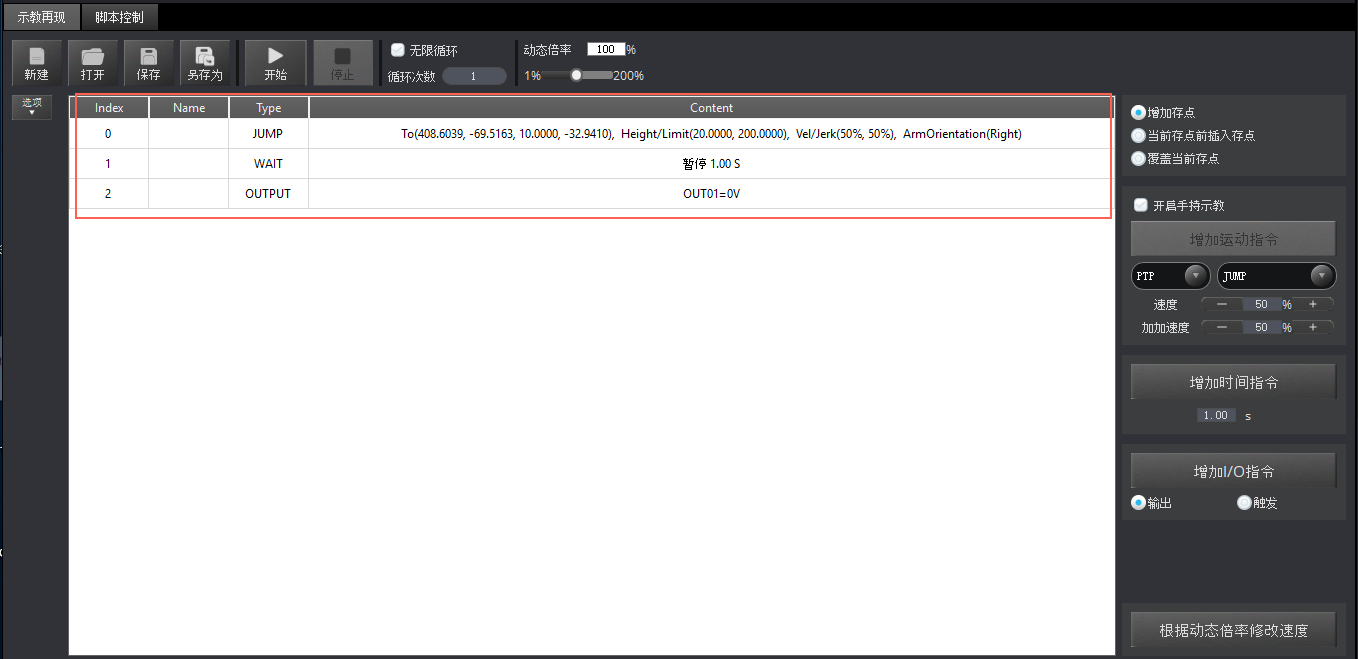
图 6.10 当前存点参数信息
表 6.5 存点参数说明
|
参数 |
说明 |
|
Type |
机械臂的指令类型 取值范围: JUMP MOVJ MOVL ARC CIRCLE:CIRCLE存点方法与ARC的存点方法相同,请参见6.1.3 ARC存点 TRIGGER OUTPUT WAIT |
|
Name |
当前存点的名称,用户自定义 |
|
Content |
根据不同的指令展示不同的内容,用户可双击“Content”显示的内容并修改 MOVL/MOVJ/JUMP/ARC/CIRCLE:坐标值、存点回放的速度百分比和加速度变化速率的百分比以及臂方向。 如果当前存点的“Type”为“MOVL”、“ARC”或“CIRCLE”时,其臂方向需与上一个存点的臂方向相同 在MOVL运动模式下,如果修改当前存点的臂方向,会出现左右手切换报警 TRIGGER:I/O引脚的输入电压 OUTPUT:I/O引脚的输出电压 WAIT:上一个存点的暂停时间 |
选中某一条存点单击鼠标右键,对存点进行复制、删除等操作,如图 6.11所示。
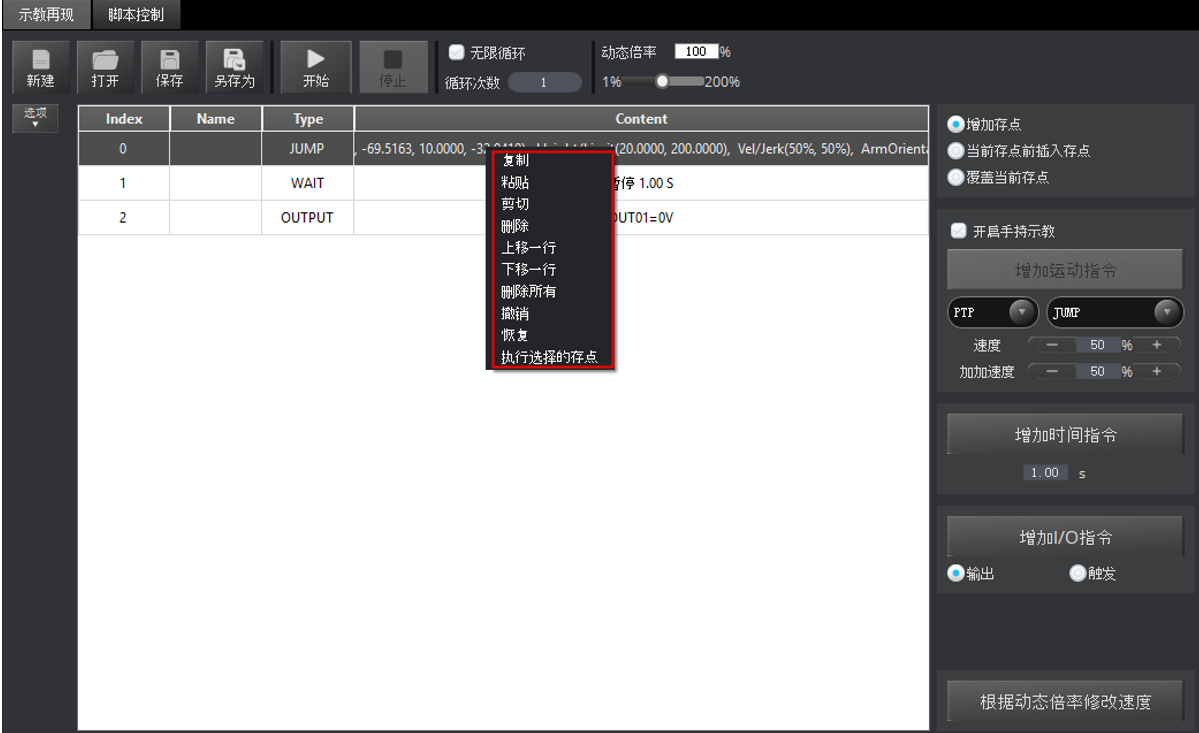
图 6.11 存点列表右键选项
当“Type”为运动模式,修改“Content”内容时,除了手动输入坐标值,还可通过点动控制面板来修改。
1. 选中待修改的存点,双击“Content”显示的内容。
弹出“运动指令设置”界面。如图 6.12所示。
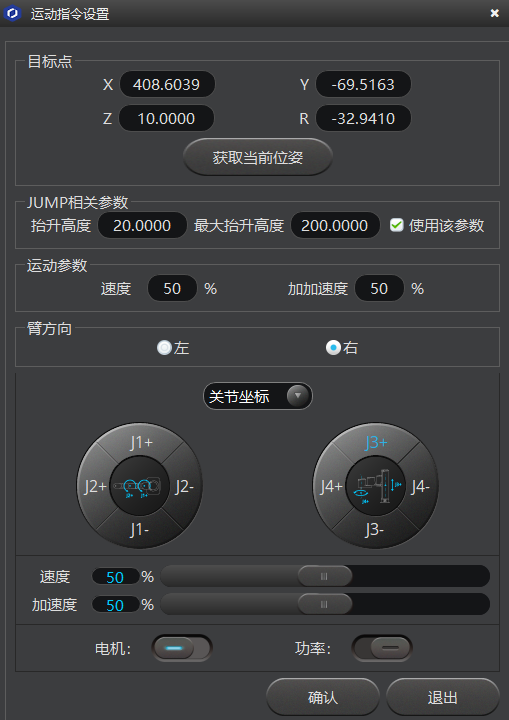
图 6.12 修改当前存点示意图
2. 参考6.2.1中的步骤 1,在点动控制面板单击坐标系按钮移动机械臂,用户可在“操作面板”界面查看机械臂移动时的坐标。
3. 单击“获取当前位姿”,获取机械臂的坐标。
4. 单击“确认”,保存修改后的存点。
如果用户需同时修改示教再现时各个存点的运动速度,可拖动“动态倍率”滑动条修改,如图 6.13所示。
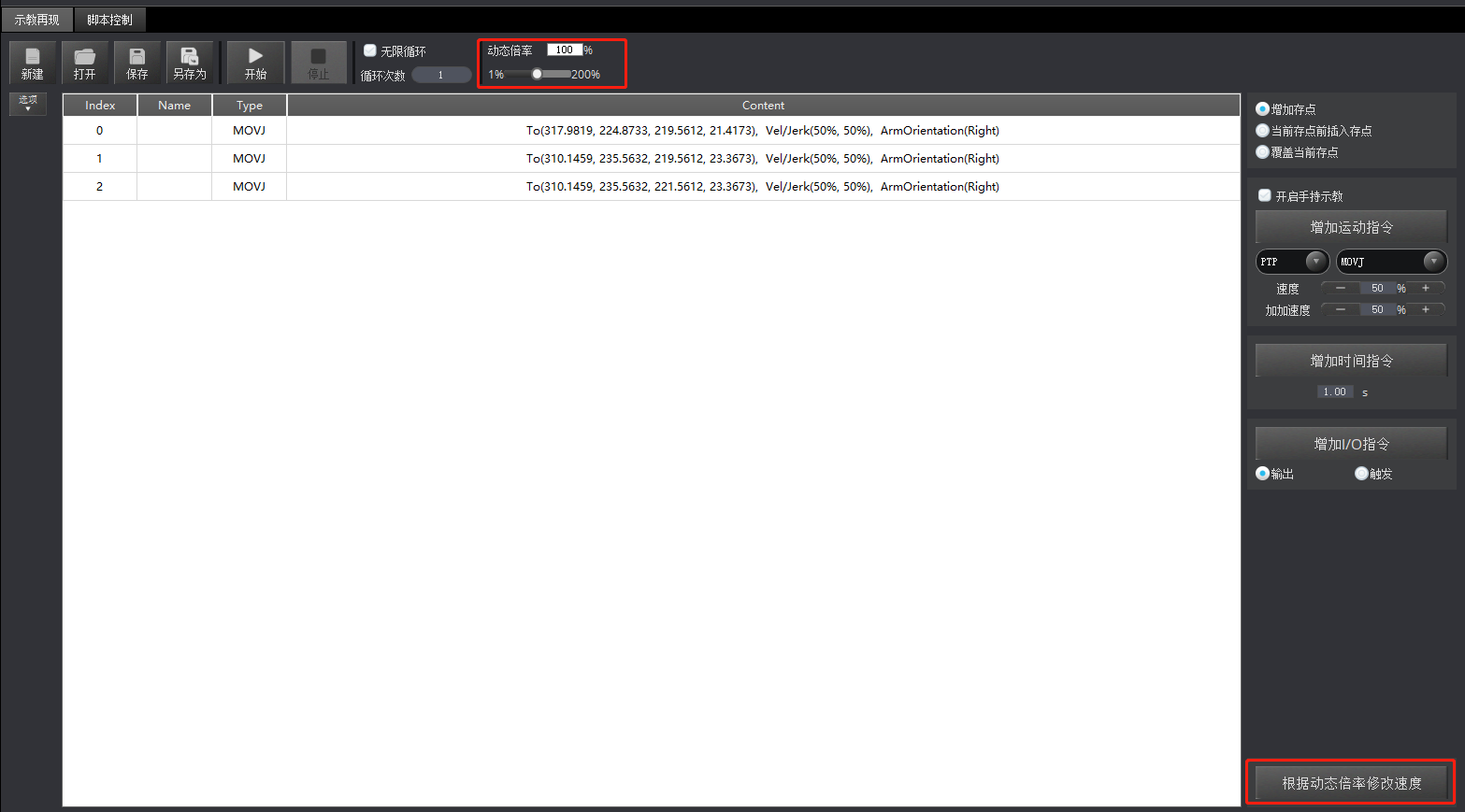
图 6.13 同时修改所有存点速度
如果不单击“根据动态倍率修改速率”,此时仅临时生效,“示教再现”界面显示的速度百分比和加加速度百分比不会变化,单击“保存”后不会保存修改后的速度和加加速度。
如果单击“根据动态倍率修改速率”,此时“示教再现”界面会显示修改后的速度百分比和加加速度百分比,单击“保存”后会将修改后的速度和加加速度写入Playback文件。