


碰撞检测主要用于减少碰撞力对机器人本体的影响,避免机器人本体或者外围设备损坏。开启碰撞检测后,当机械臂碰撞到工件或其他障碍物时,机械臂会自动停止运行,以防机器或操作人员碰撞受伤。
注意
如需使用碰撞检测功能,请确保M1Studio版本为V1.1.6及以后版本且A9固件版本为a9_app-0057及以后版本。若不满足,请从https://cn.dobot.cc/downloadcenter/dobot-m1.html?sub_cat=119#sub-download获取对应版本M1Studio以及A9固件,并升级A9固件,详细请参见6.9.2 固件升级。
前提条件
Dobot M1已上电,且与PC机正常连接。
已连接Dobot M1和急停开关。
操作步骤
步骤 1 获取机械臂各关节动力学参数,以防碰撞检测误触发。
1. 卸载机械臂末端的夹具和负载,并确保机械臂工作空间内无障碍物。如果未安装,可跳过该步骤。
2. 在M1Studio界面选择“工具 > SafeSetting…”。
进入“Safe Mode Setting”界面。
3. 在“Safe Mode Setting”界面将“Change Level”设置为“Low”,“PlayLoad”设置为“0”,碰撞后策略设置为“EX Force Restart”,并单击“Save”后退出,如图 6.30所示。
&说明
无论当前是不是“EX Force Restart”,都需要重新选择一下,以防获取参数值失败。
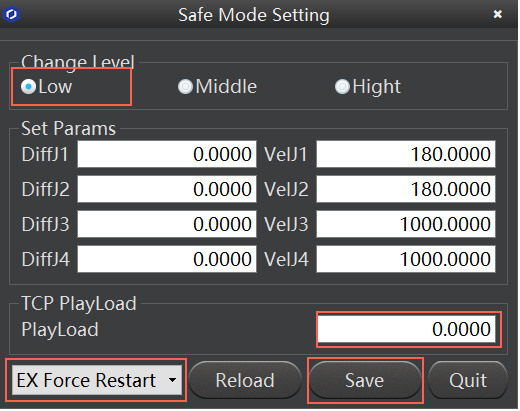
图 6.30 设置碰撞检测参数
4. 在M1Studio界面选择“工具 > DynamicSetting…”。
进入“Dynamic Setting”界面。
5. 请务必认真阅读“Dynamic Setting”界面显示的注意事项,然后单击“Start”。
此时,机械臂进入动力学辨识的激励轨迹程序(大小臂随机运动),待进度条显示为100%后,会自动获取各关节的动力学参数,如图 6.31所示。
不同机器获取各关节的动力学参数可能不同,但是与图 6.31所示的结果差别不大。若误差很大,则获取动力学参数失败,请重新执行1~5。
注意
获取动力学参数过程中,机械臂会随机运动一定时间,请确保机械臂工作空间内无障碍物,以防发生碰撞,获取动力学参数失败。
机械臂运动过程中请勿断开电源或对机械臂进行其他操作,以免损坏设备。
如果机械臂随机运动过程中出现意外情况,请在“Dynamic Setting”页面单击“Stop”使机械臂停止运动。
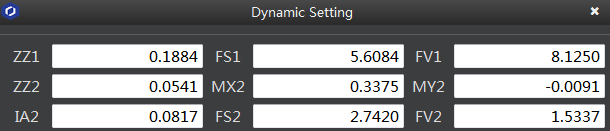
图 6.31 获取动力学参数
6. 单击“Save”并退出。
机械臂各关节动力学参数保存至主控板。
步骤 2 根据实际情况安装末端夹具及负载。
步骤 3 在M1Studio界面选择“工具 > SafeSetting…”。
进入“Safe Mode Setting”界面。
步骤 4 设置碰撞检测灵敏度,本节操作设置为“Middle”。
此时,“Set Params”区域的参数会根据设置的灵敏度等级自动生成,如图 6.32所示。详细参数说明如表 6.9所示。
注意
“Set Params”区域的参数会根据设置的灵敏度等级自动生成,且只会对水平方向的碰撞检测有效,请勿随意更改“Set Params”区域的参数值。如果碰撞检测需在垂直方向上生效,则需将“DiffJ3”的参数设置为40~50范围内的任意值,其余保持不变。

图 6.32 设置灵敏度等级
表 6.9 碰撞检测灵敏度参数说明
|
参数 |
说明 |
|
Low |
无约束,即不开启碰撞检测 |
|
Middle |
开启碰撞检测,机械臂运行速度下降30%,检测灵敏度中等 |
|
High |
开启碰撞检测,机械臂运行速度下降50%,检测灵敏度高 |
步骤 5 设置机械臂末端负载,请设置为实际的末端负载大小,假设末端的负载为1 kg,如图 6.33所示。
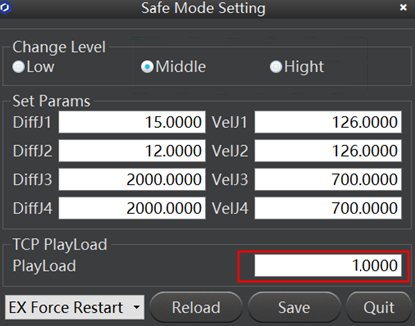
图 6.33 设置末端负载
步骤 6 设置碰撞后策略,本节操作设置为“EX Force Restart”。
&说明
无论当前是不是“EX Force Restart”,都需要重新选择一下,以防获取参数值失败。
表 6.10 碰撞后策略说明
|
参数 |
说明 |
|
EX Force Restart |
碰撞后需通过外力触碰Dobot M1大小臂(水平方向)使Dobot M1重新运行,继续当前任务 |
|
5s Restart |
碰撞5s后Dobot M1重新运行,继续当前任务 |
步骤 7 单击“Save”后再单击“Quit”,碰撞检测参数设置完成。
步骤 8 重新启动M1,使碰撞检测参数生效。
步骤 9 验证碰撞检测是否生效。
假设机械臂在正常运动中碰撞到工件,此时机械臂会停止运动,如果用外力触碰机械臂大小臂,机械臂又能重新运动,此时说明碰撞检测参数设置生效。
异常处理
如果开启了碰撞检测功能后,碰撞检测误触发或触发碰撞检测报警,请重新获取各关节动力学参数。