


外部扩展I/O控制即外部设备通过外部扩展I/O控制机械臂。本节以PLC作为外部设备,描述如何使用PLC通过外部扩展I/O信号控制机械臂。除机械臂、PLC外,还需准备DB62扩展套件(包括DB62连接线和扩展板,需单独购买),DB62扩展套件如图 6.56所示。
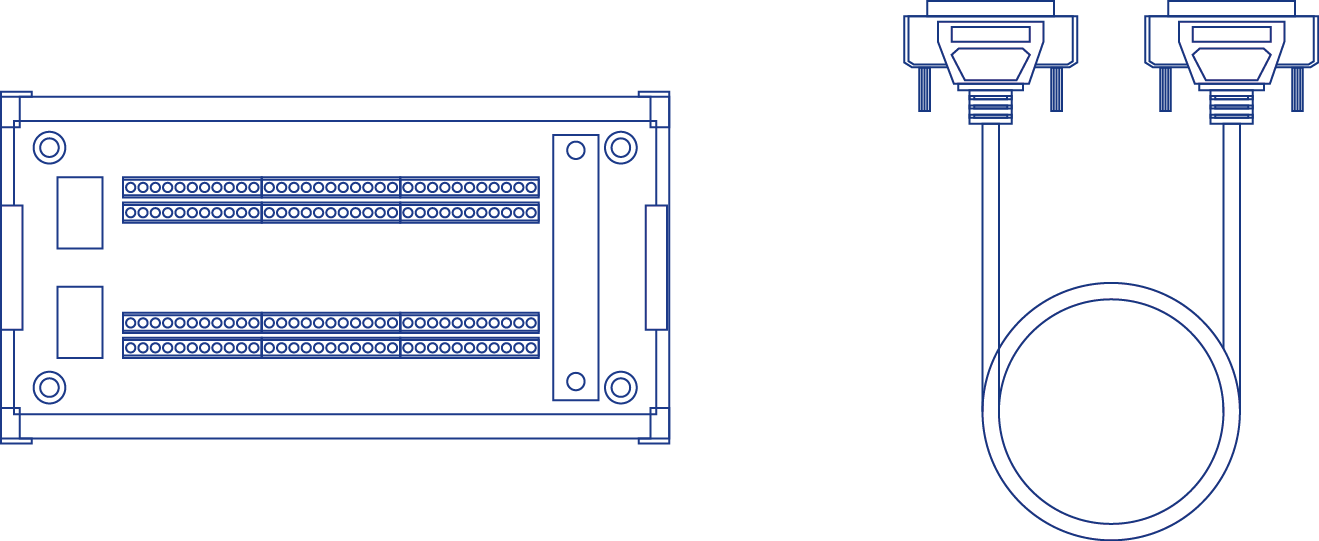
图 6.56 DB62扩展套件
详细扩展I/O接口说明请参见4.3.3 外部扩展板接口。
前提条件
M1Studio已启动。
已通过网线将Dobot M1与PC机连接,且Dobot M1和PC机在同一网段,请参见5.2.4 网线连接。
本节通过路由器连接Dobot M1和PC机。
Dobot M1已上电。
已获取需脱机运行的Script脚本、Blockly程序或存点列表,且能正常运行。本节已Script脚本为例。
已连接Dobot M1和急停开关。
已安装PLC编程软件。
本节使用三菱FX5U型号的PLC,GX Works3编程软件,详细安装使用本节不做详细说明。
本示例接线场景如图 6.57所示。
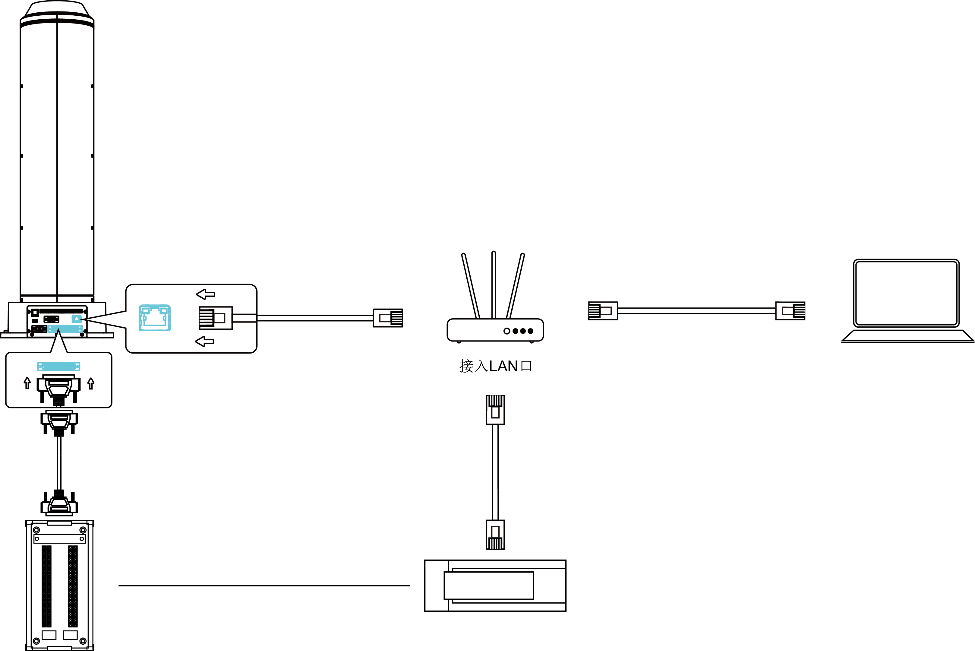
图 6.57 连接示意图
操作步骤
步骤 1 将DB62连接线一端连接至机械臂底座背面的外部扩展I/O接口,另一端连接至扩展板,如图 6.58所示。
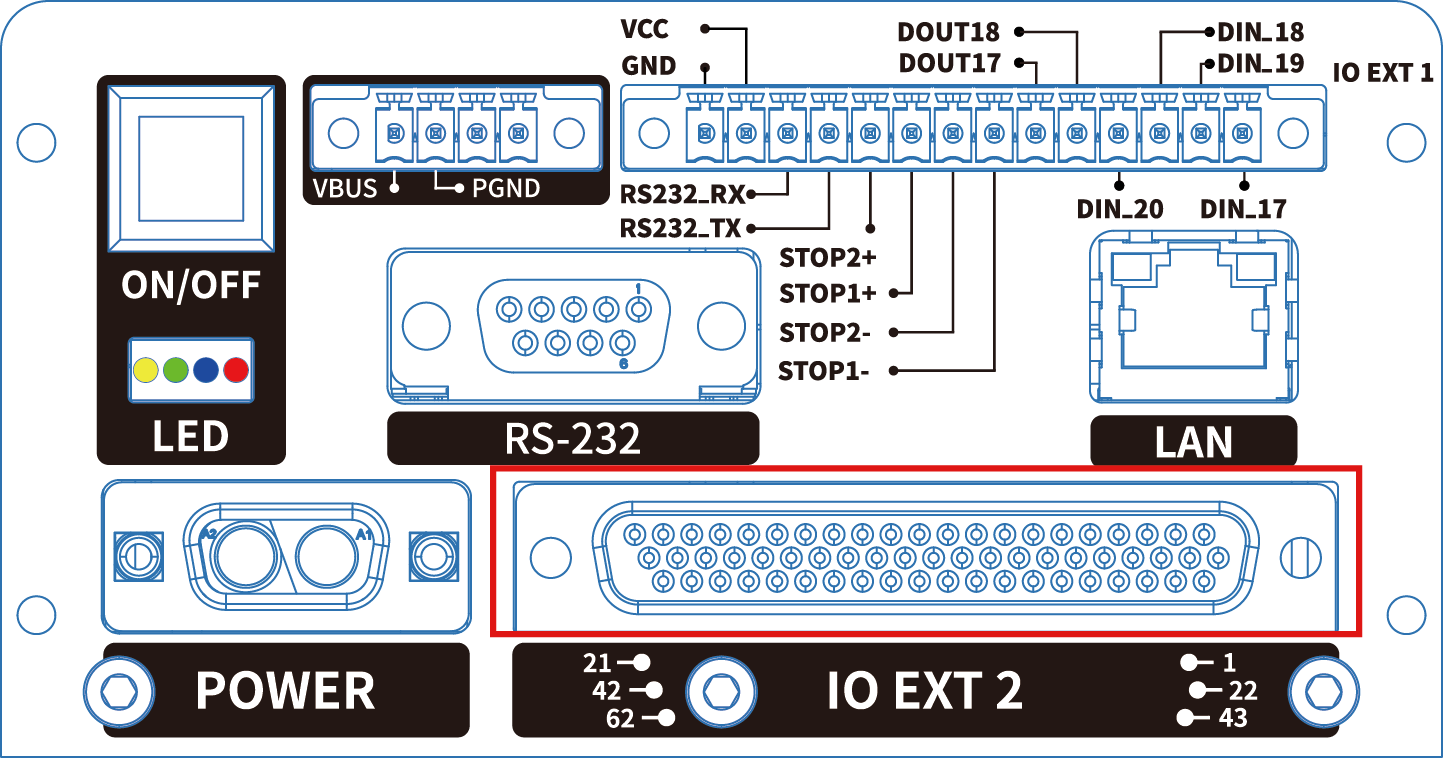
图 6.58 连接DB62扩展板
步骤 2 连接PLC与电脑,本节通过路由器连接PLC与电脑。
请根据实际场景进行替换。
步骤 3 通过线缆连接扩展板和PLC,将外部I/O的输入接口连接PLC的输出接口,假设连接至PLC的Y0~Y5接口,接线示意图如图 6.59所示。
请采用AWG20~AWG24规格的线缆进行连接。
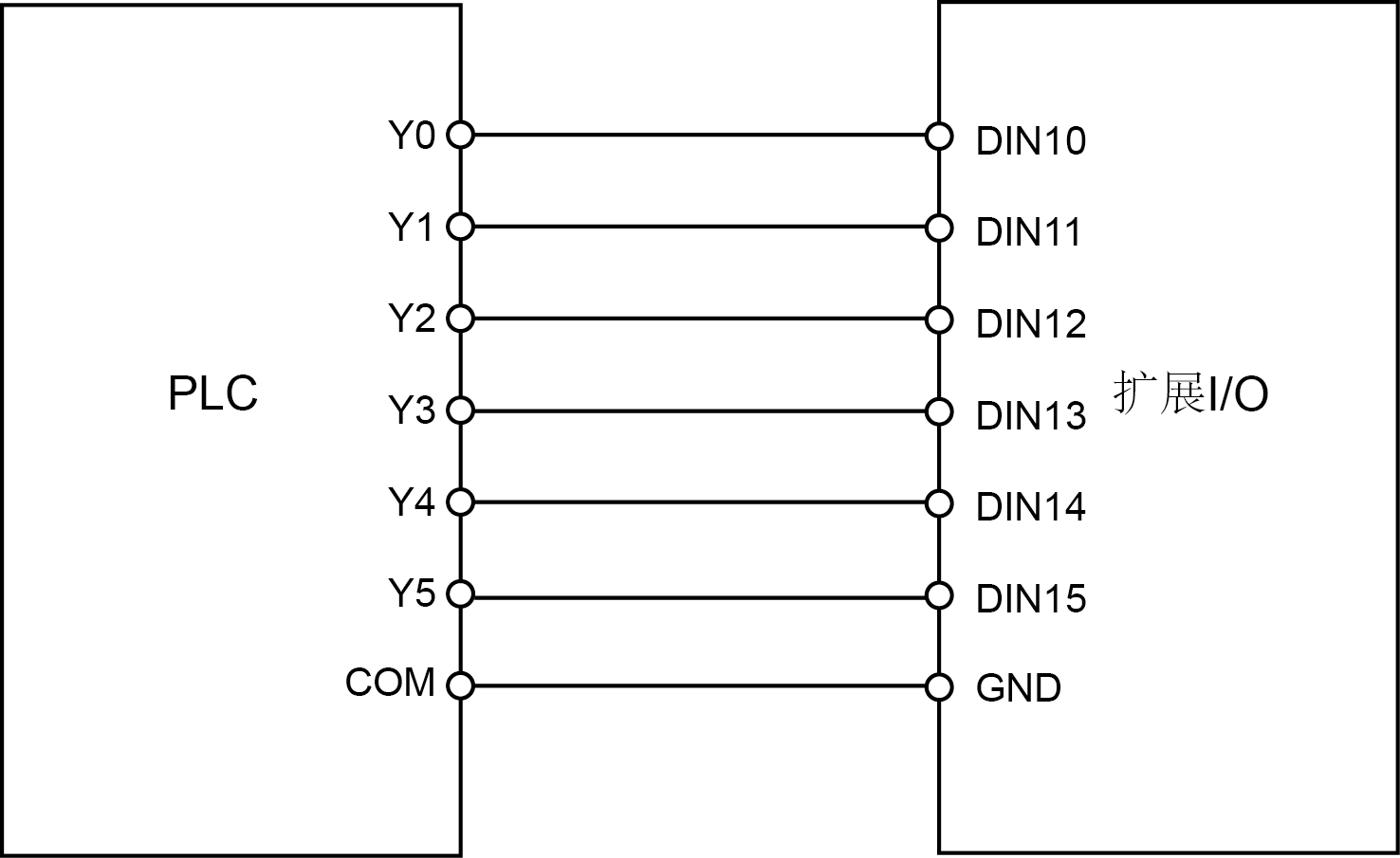
图 6.59 外部I/O接线
外部扩展I/O DIN10~DIN15接口定义如表 6.13所示。
表 6.13 DIN10~DIN15接口定义
|
接口 |
说明 |
|
DIN10 | |
|
DIN11 |
外部I/O控制信号,即机械臂启动外部I/O控制功能 |
|
DIN12 |
继续信号 |
|
DIN13 |
暂停信号 |
|
DIN14 |
停止信号 触发该信号后,机械臂会停止脱机运行,但是外部I/O控制功能不会关闭,此时可通过M1Stuido控制机械臂(Dobot模式)或再次触发DIN 15运行脱机脚本 |
|
DIN15 |
启动信号,运行脱机脚本 触发该信号前,需先触发DIN 11 |
&说明
所有I/O信号为沿触发,高电平变为低电平有效。
步骤 4 将已获取的Script脚本上传至Dobot M1控制器。
1. 在M1Studio界面的串口下拉菜单选择Dobot M1对应IP地址,单击“连接”。
2. 单击“工具 > 脱机管理 > 上传脱机脚本”,将Script脚本上传至Dobot M1控制器,如图 6.60所示。

图 6.60 上传Script脚本
3. 在“脱机脚本管理”界面选中已上传的Script脚本,单击“离线运行”,使Script脚本处于离线运行的状态,如图 6.61所示。

图 6.61 脚本状态
步骤 5 在GX Works3编程软件新建一个PLC工程并编译,如图 6.62所示。
本节不对PLC工程如何编译进行详细说明。
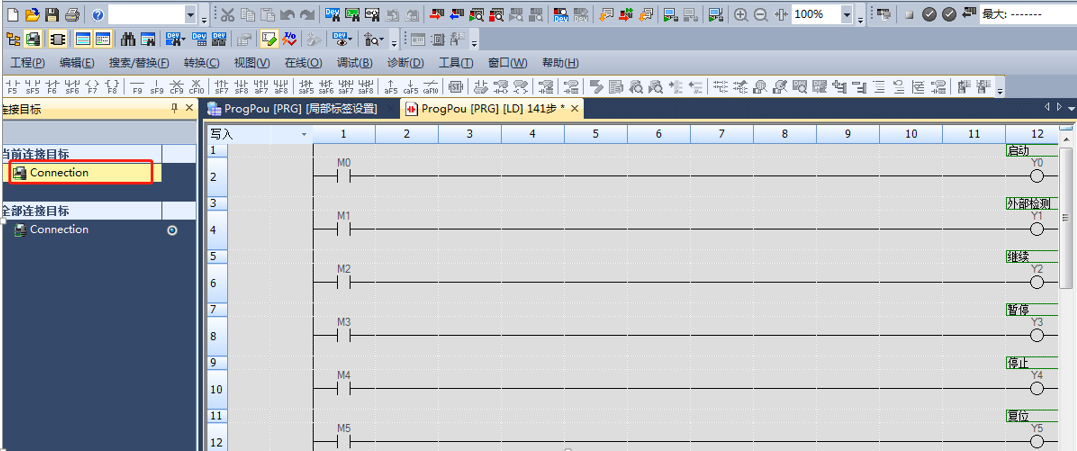
图 6.62 PLC程序
步骤 6 检查PLC与外部扩展I/O板接线是否正确。
1. 在M1Studio界面的串口下拉菜单选择Dobot M1对应IP地址,单击“连接”。
2. 单击“工具 > I/O助手”。
弹出“I/O助手”界面。
3. 在GX Works3界面触发Y0信号,关注“I/O助手”界面上DIN 10信号的变化。
如果DIN 10的信号有变化(“I/O助手”界面上DIN 10显示的电压有变化),则说明接线正确。如果无变化,请重新接线。
4. 参见3和图 6.59依次检测DIN 11~ DIN 15信号的变化。
建议DIN 11信号最后检测,因为触发了DIN 11,机械臂开启外部I/O控制功能,再触发DIN 15,机械臂会脱机运行。
步骤 7 通过外部I/O控制机械臂脱机运行。
1. 在GX Works3界面触发Y1信号,机械臂开启外部I/O控制功能。
2. 触发Y5信号,机械臂开始脱机运行。
如果用户需停止脱机运行,需触发Y4信号。此时机械臂停止脱机运行,但是外部I/O控制功能不会关闭。若需继续进行脱机运行,则直接触发Y5信号即可。