


注意
仅SN编号为“DT2118xxxxx”及以后编号的Dobot M1才安装回零开关。若不是,则不能通过此方法进行回零操作。
其中,xxxxx为随机序列编号,请根据实际情况替换。
执行回零操作前请确保Dobot M1 A9固件为02005800及以后版本,Dobot固件为1.3.0及以后版本,驱动固件为1.3.2及以后版本。否则,回零过程中会触发限位报警,导致回零失败。Dobot M1固件版本可在“M1Studio > 帮助 > 关于M1Studio”查看。若版本较低,请参见6.9.2 固件升级进行升级。
操作步骤
危险
执行回零操作时请勿使用“Initialization.exe”软件,防止机械臂未按既定的路径运动,从而对外围设备造成干扰,损坏设备。
步骤 1 产生电池电压低相关报警后,M1Stduio会弹出如图 7.3所示的界面。
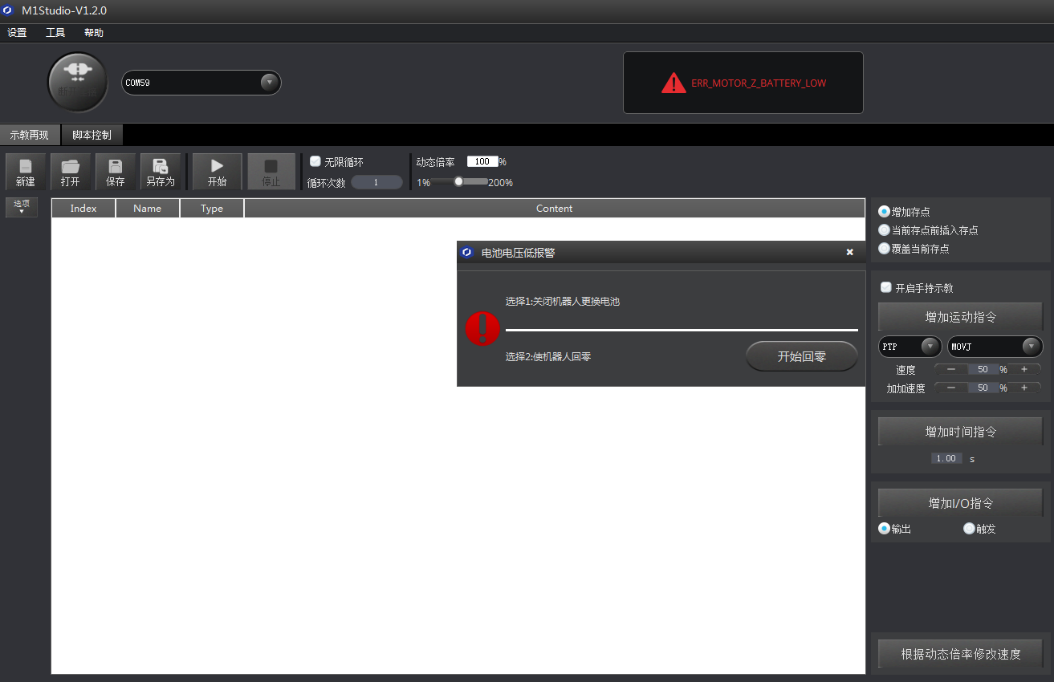
图 7.3 电池电压低报警
步骤 2 在“电池电压低报警”界面单击“开始回零”。
步骤 3 勾选界面提示后并单击“回零”,如图 7.4所示。
&说明
该操作是为了让用户确保机械臂工作空间内无障碍物,以防在回零过程中发生碰撞,导致回零失败。
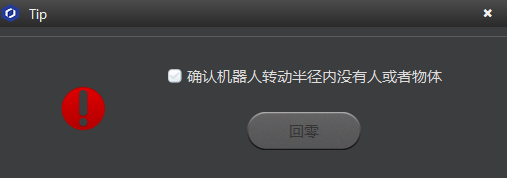
图 7.4 回零操作
机械臂会按如下步骤自动运行:
1. 机械臂J3轴移动至正向限位位置附近,触发J3轴回零开关后低速反向运动,脱离回零开关位置后停止运动。
2. J1轴和J2轴以左手方向移动至限位位置附近,触发J1轴回零开关和J2轴回零开关后低速反向运动,脱离回零开关位置后停止运动,到达回零位置,此时说明回零完成。
回零完成后,机械臂以此位置为机械臂零点位置,机械臂最终坐标值如图 7.5所示。

图 7.5 回零坐标
异常处理
如果回零后坐标值与图 7.5相比误差较大,说明回零失败,请按如下操作重新回零。
步骤 1 请参见7.3.1.2 编码器电池更换中的步骤 11复位编码器。
步骤 2 重新连接M1Studio。
步骤 3 在M1Studio界面选择“工具 > 归零”,重新回零。