点位模式即实现点到点运动,Dobot M1的点位模式包括MOVJ、MOVL以及JUMP三种运动模式。不同的运动模式,示教后存点回放的运动轨迹不同。
MOVJ:关节运动,由A点运动到B点,各个关节从A点对应的关节角运行至B点对应的关节角。关节运动过程中,各个关节轴的运行时间需一致,且同时到达终点,如图 2.7所示。
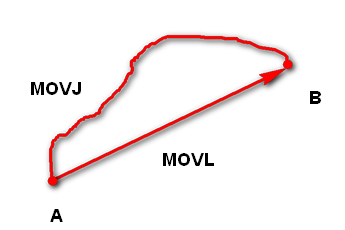
图 2.7 MOVL和MOVJ运动模式
MOVL:直线运动,A点到B点的路径为直线,如图 2.7所示。
JUMP:门型轨迹,A点到B点以MOVJ运动模式移动,如图 2.8所示。
1. 以MOVJ运动模式上升到一定高度(Height)。
2. 以MOVJ运动模式过渡到最大抬升高度(Limit)。
3. 以MOVJ运动模式平移到B点上方的高度处。
4. 以MOVJ运动模式过渡到B点高度加上Height后的高度处。
5. 以MOVJ运动模式下降到B点所在位置。

图 2.8 JUMP运动模式
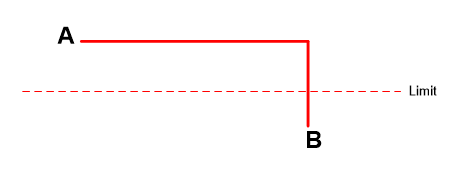
JUMP运动模式下,如果起始点或结束点高度大于等于最大抬升高度,或者起始点抬升到一定高度后,大于等于最大抬升高度,其运动轨迹与图 2.8有所不同。假设A为起始点,B为结束点,Limit为最大抬升高度,Height为抬升高度。
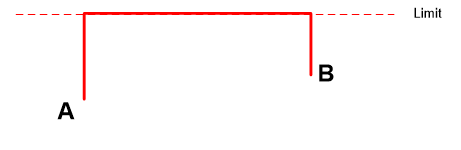
A点、B点高度均大于Limit,且A点高度大于B点高度。
A点、B点高度均大于Limit,且A点高度小于B点高度。
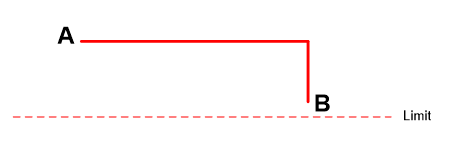
A点高度大于Limit,B点高度小于Limit。
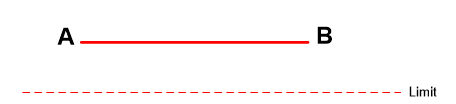
A点、B点高度相同,且大于Limit。
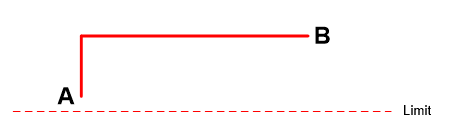
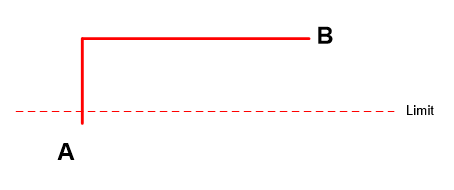
A点高度小于Limit,B点高度大于Limit。
A点、B点高度与Limit相同。

A点、B点高度均小于Limit,A点高度+Height和B点+Height大于Limit。