


若点动或存点的方法不正确时,比如使机械臂限位或处于奇异点,导致机械臂在运行过程中可能会产生报警,详细如表 6.2所示。产生报警时,机械臂底座红色指示灯常亮。
注意
奇异点:如果Dobot M1的J2轴和J1轴速度方向共线,则导致机械臂不能合成任意速度(大小和方向),只能合成与J2(J1)方向相同的速度,即机械臂自由度退化,使机械臂不能朝任意方向移动。Dobot M1的奇异点位置为J2轴处于±10º左右的位置。存点再现时,MOVJ和JUMP运动模式下采用关节运动模式,不会产生奇异点位置报警。
一般情况下,点动产生报警后若存点,会导致该存点无效。用户需反向移动关节坐标系,清除报警信息后再存点。但是若点动导致奇异点位置触发报警,存点时采用MOVJ或JUMP运动模式,该点可为有效点。
MOVJ或JUMP运动模式下,如果两点相同,但臂方向不同,机械臂运动时可能会出现J1、J4轴限位,此时会产生限位报警,需修改报警的存点并重新存点,并手动清除报警。
表 6.2 报警说明
|
报警条件 |
清除方法 |
|
点动 | |
|
关节坐标系限位 |
反向移动限位的关节坐标系,可自动清除报警 |
|
笛卡尔坐标系限位 |
反向移动关节坐标系,可自动清除报警 |
|
笛卡尔坐标系的点为奇异点 |
反向移动关节坐标系的J2轴,可自动清除报警 |
|
再现 | |
|
MOVL运动模式下起始点或结束点为奇异点 |
需手动清除报警并修改存点 |
|
MOVL运动模式下运动轨迹中的某一点为奇异点 |
需手动清除报警并修改存点 |
|
MOVL运动模式下修改存点的臂方向 |
需手动清除报警并修改存点的臂方向 |
|
ARC运动模式下中间点或结束点为奇异点 |
需手动清除报警并修改存点 |
|
ARC运动模式下运动轨迹中的某一点为奇异点 |
需手动清除报警并修改存点 |
|
ARC运动模式下圆弧的三点两两重合 |
需手动清除报警并修改存点 |
|
ARC运动模式下圆弧的三点在同一直线 |
需手动清除报警并修改存点 |
|
所有运动模式下运动轨迹超出工作空间 |
需手动清除报警并修改存点 |
|
所有运动模式下关节限位 |
需手动清除报警并修改存点 |
手动清除报警的方法如下:
前提条件
Dobot M1已上电,且与PC机正常连接。
已连接Dobot M1和急停开关。
操作步骤
步骤 1 在M1Studio界面双击产生的报警提示,如图 6.1所示。
弹出“报警和日志”界面。

图 6.1 报警提示示意图
步骤 2 在“报警和日志”界面的“Dobot M1报警”页签查看对应的报警,并根据报警解决方法清除报警,如图 6.2所示。
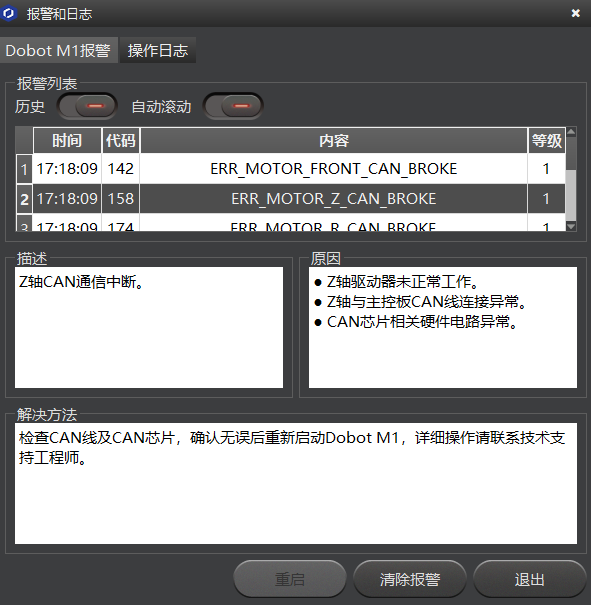
图 6.2 报警界面
注意
“重启”按钮仅在紧急停止报警时才有效。
其中,报警按钮说明如表 6.3所示。
表 6.3 报警按钮说明
|
按钮 |
说明 |
|
历史 |
是否显示历史报警信息 如果History的状态为 如果History的状态为 |
|
自动滚动 |
是否自动滚动报警信息 如果AutoScroll的状态为 |
步骤 3 在“报警和日志”界面的“Dobot M1报警”页签选中对应的报警,单击“清除报警”。
在M1Studio界面可看到无报警提示,则说明报警信息已清除。

