


ARC与PTP运动模式不同,ARC是圆弧的运动轨迹,需存三个点,才能完成圆弧运动。CIRCLE运动模式的存点方法与ARC存点方法相同,用户如果采用CIRCLE运动模式,请参见本章内容进行存点。
前提条件
Dobot M1已上电,且与PC机正常连接。
已连接Dobot M1和急停开关。
操作步骤
注意
使用ARC运动模式时,ARC只存中间点和结束点,需结合其他运动模式确认圆弧的起始点。ARC运动模式存点时请注意以下情况,以免机械臂产生报警。
圆弧三点两两不能重合。
圆弧三点不能在同一条直线。
圆弧不能超出工作空间。
结合其他运动模式时,两种运动模式的存点方向不同,导致机械臂无法运行。
假设圆弧上的三点为A、B、C,A为起始点,C为结束点,如图 6.3所示。
图 6.3 圆弧运动轨迹
步骤 1 在M1Studio的“操作面板”界面坐标系下拉菜单选择“笛卡尔坐标”,单击笛卡尔坐标系按钮,将机械臂移动至一点,记为A点。
步骤 2 在M1Studio界面选择“示教再现”。
进入“示教再现”界面。
步骤 3 在“示教再现”界面勾选“增加存点”。
步骤 4 在“示教再现”界面选择运动模式为“PTP > MOVJ”,单击“增加运动指令”,将A点的信息记录下来。
步骤 5 在“操作面板”界面单击笛卡尔坐标系按钮,将机械臂移动至另一点,记为B点。
步骤 6 在“示教再现”界面选择运动模式为“ARC > 中间点”,单击“增加运动指令”,将B点信息记录下来。此时,在“示教再现”界面运动模式会自动跳转至“目标点”。
步骤 7 在“操作面板”界面单击笛卡尔坐标系按钮,将机械臂移动至另一点,记为C点,且与A、B点不在一条直线上
步骤 8 单击“增加运动指令”,将C点信息记录下来。
注意
A点与B点之间不能单击“增加时间指令”设置暂停时间,否则机械臂无法运行。
步骤 9 单击“开始”,可看到机械臂以圆弧轨迹运动。ARC存点信息如图 6.4所示。
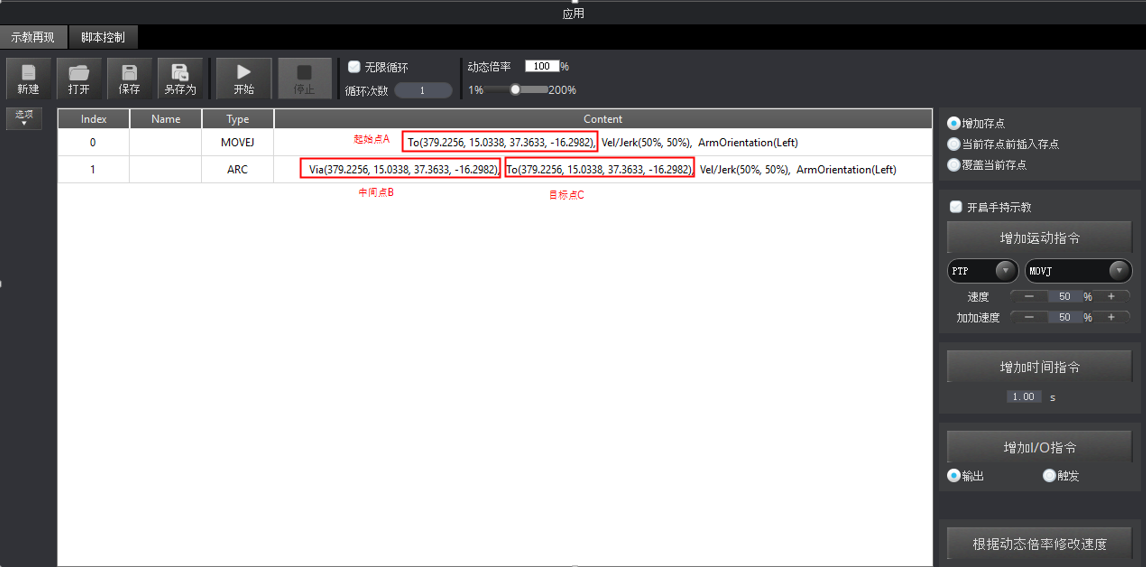
图 6.4 ARC运动存点信息