Dobot M1已上电,且与PC机正常连接。
已连接Dobot M1和急停开关。
利用示教再现功能对实物进行吸取或者抓取时,Dobot M1需安装气泵和吸盘套件。气泵连接请参见3.4 (可选)气泵盒安装。
当用户需要对实物进行搬运、智能分拣或者需写字画画时,可采用示教再现功能完成。本示例以末端夹具为吸盘套件为例进行操作。
步骤 1 选择一个实物放置于机械臂附近,可在M1Studio的“操作面板”界面选择如下三种任一方法将机械臂移动至实物上方,假设为A点。机械臂至实物距离请根据实际情况决定。
在“操作面板”界面坐标系下拉菜单选择“笛卡尔坐标”,单击笛卡尔坐标系按钮。
在“操作面板”界面坐标系下拉菜单选择“关节坐标”,单击关节坐标系按钮。
在“操作面板”界面单击电机的 图标,用手移动机械臂。
图标,用手移动机械臂。
注意
点动时如果用户需用手移动机械臂,则单击,使机械臂电机处于下使能的状态;如果用户需单击坐标系按钮移动机械臂,则需单击 ,使机械臂电机处于使能状态。两者不能同时使用。
,使机械臂电机处于使能状态。两者不能同时使用。
点动时如果机械臂某一轴限位或者笛卡尔坐标系处于奇异点位置,会触发报警,报警说明请参见表 6.2。产生报警后若存点,会导致该存点无效,用户需移动坐标系,清除报警信息后再存点。但是若奇异点位置触发报警,存点时采用MOVJ或JUMP运动模式,该点可为有效点。
步骤 2 在M1Studio界面选择“示教再现”。
进入“示教再现”界面。
步骤 3 在“示教再现”界面勾选“增加存点”。
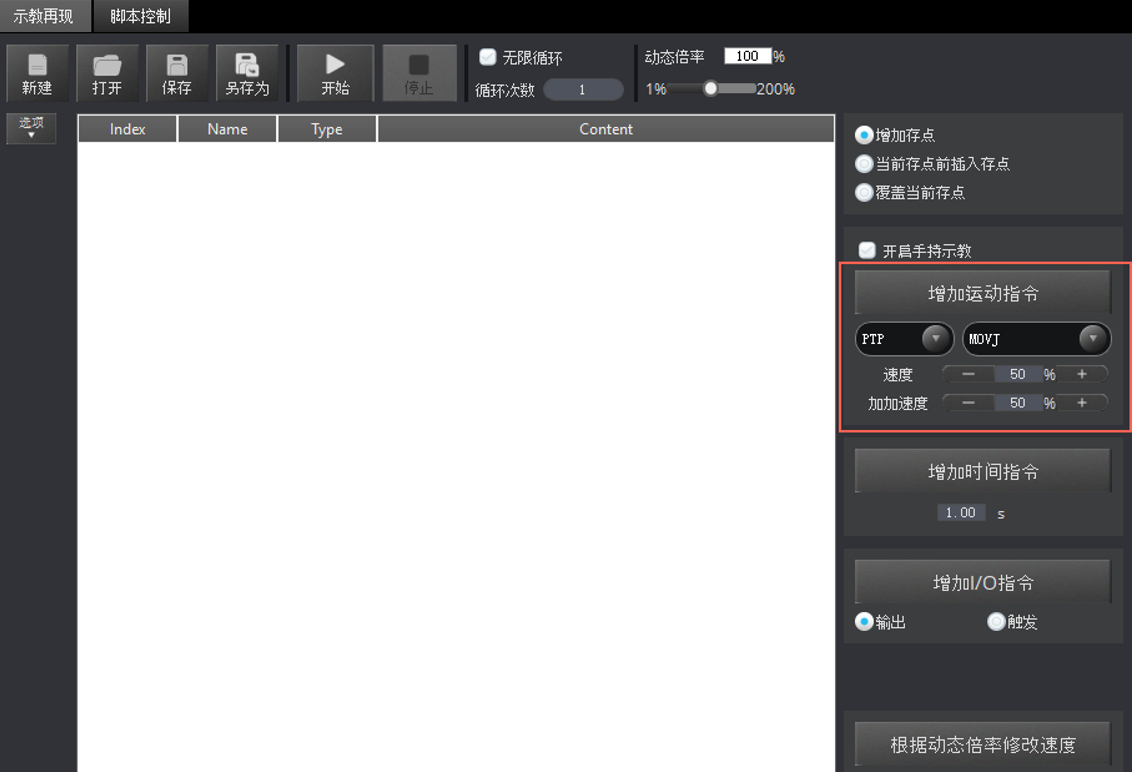
步骤 4 在“示教再现”界面选择运动模式为“PTP > JUMP”,如图 6.5所示,JUMP的存点约束请参见6.1.4 JUMP存点说明。
&说明
该运动模式仅为示例,用户可根据2.3.4 运动功能以及实际的应用场景来选择运动模式。如果用户采用ARC运动模式存点,请参见6.1.3 ARC存点说明。
图 6.5 运动模式选择示意图
步骤 5 在“示教再现”右侧“增加运动指令”界面设置存点回放的速度百分比“速度”和加速度变化速率百分比“加加速度”,假设均设为50%,单击“增加运动指令”,将步骤 1的信息存点。
“示教再现”左侧界面显示“Type”为“JUMP”的存点信息,如图 6.6所示。
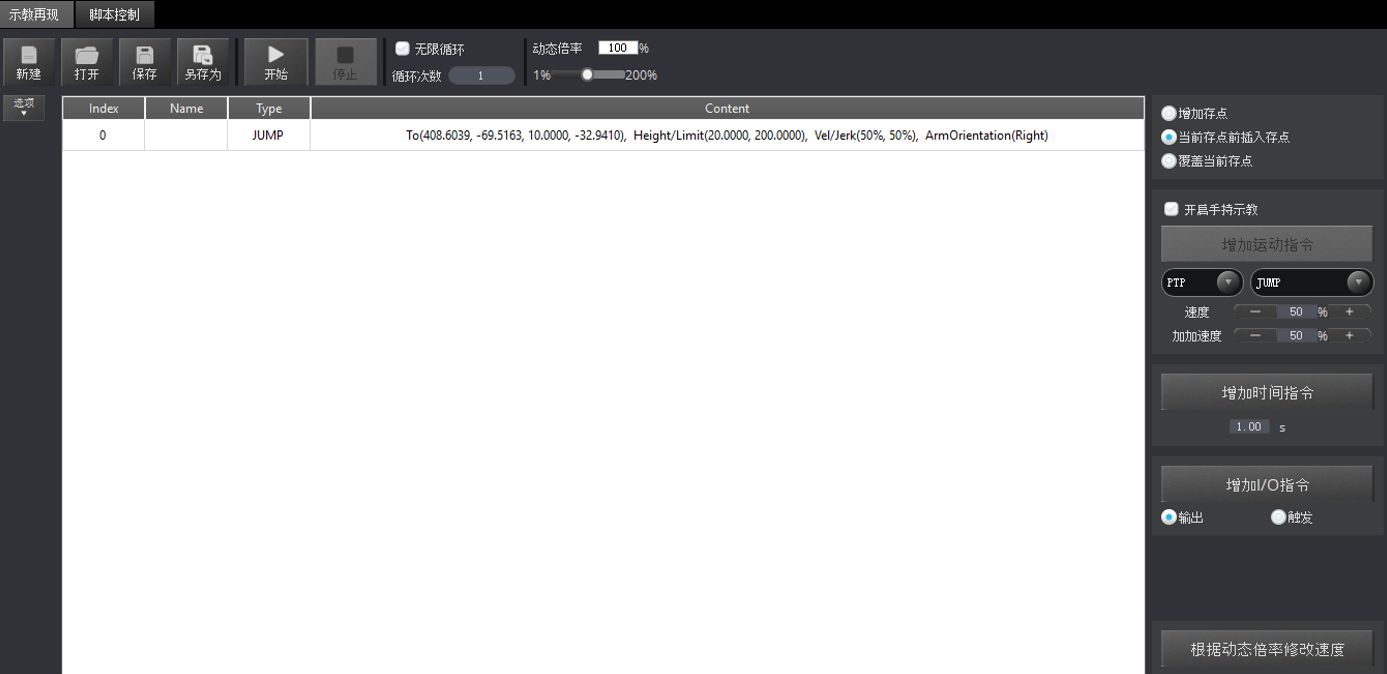
图 6.6 坐标值显示示意图
JUMP运动模式下其抬升高度(Height)和最大抬升高度(Limit)需通过双击当前存点的“Content”显示的内容来修改,如图 6.7所示。
注意
JUMP运动模式下如果抬升了一定高度后不需抬升至最大高度,则取消勾选“使用该参数”。
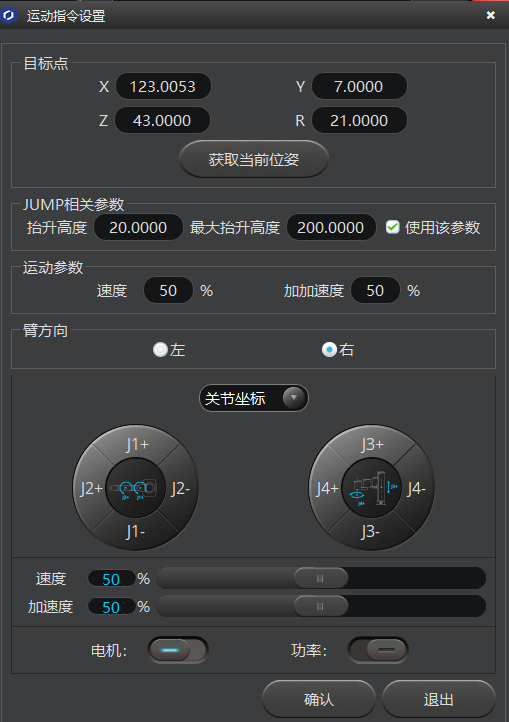
图 6.7 运动参数设置
步骤 6 在“示教再现”右侧的“增加时间指令”界面设置A点的暂停时间,假设为3秒,并单击“增加时间指令”。
“示教再现”左侧界面会显示“Type”为“WAIT”的存点信息。
步骤 7 利用末端的吸盘套件吸住实物。
注意
假设使用底座I/O接口的“DOUT17”、“DOUT18”控制气泵。DOUT17控制气泵的吸气和出气,DOUT18气泵的启停。本操作仅为示例,在真实场景中,用户使用的I/O接口不同,输出的I/O引脚也会不同,请用户根据实际情况替换。
1. 在“示教再现”右侧的“增加I/O指令”界面选择“输出”。
“示教再现”左侧界面会显示“Type”为“OUTPUT”的存点信息。
2. 在“示教再现”左侧界面选中“Type”为“OUTPUT”的存点,双击“Content”。
弹出“I/O指令设置”窗口。
3. 在“I/O指令设置”界面的I/O输出引脚的下拉框中选择“OUT17并选中“24V”,单击“添加”。
4. 重复执行3,添加“OUT18选中“24V”,单击“OK”。
“示教再现”左侧界面的“Type”为“OUTPUT”的存点会显示I/O引脚的相关信息,如果单击鼠标右键选择“执行选择的存点”,气泵会处于运行状态,实物会被机械臂吸住。
步骤 8 在“操作面板”界面坐标系下拉框选择“笛卡尔坐标”,单击“Z+”升高机械臂,并单击坐标系面板上的其他按钮,如“X+”,将机械臂移动至另外一点,假设为B点。
步骤 9 参考步骤 4至步骤 6,记录B点的存点信息。
注意
假设使用底座I/O接口的“DOUT17“DOUT18控制气泵。本操作仅为示例,在真实场景中,用户使用的I/O接口不同,输出的I/O引脚也会不同,请用户根据实际情况替换。
1. 在“示教再现”右侧的“增加I/O指令”界面选择“输出”。
“示教再现”左侧会界面会显示“Type”为“OUTPUT”的存点信息。
2. 在“示教再现”左侧界面选中“Type”为“OUTPUT”的存点,双击“Content”。
弹出“I/O指令设置”窗口。
3. 在“I/O指令设置”界面的I/O输出引脚的下拉框中选择“OUT17并选中“0V”,单击“添加”。
4. 重复执行3,添加“OUT18并选中“24V”,单击“确认”。
“示教再现”左侧界面的“Type”为“OUTPUT”的存点会显示I/O引脚的相关信息,如果单击鼠标右键选择“执行选择的存点”,气泵会处于关闭状态,实物会被机械臂释放。
&说明
当前仅为一条运动轨迹的示例。用户可参考步骤 1至步骤 10来记录多条运动轨迹。
步骤 11 在“示教再现”界面单击“保存”。
弹出保存的对话框。
步骤 12 输入存点列表的名称和保存路径。存点列表的默认保存路径为“安装目录/M1Studio/config/pbstore”,用户可根据实际情况替换。
步骤 13 在“示教再现”界面单击“开始”,机械臂根据存点列表回放运动轨迹,对实物进行吸取和释放。