


本节根据实际的运动轨迹描述机械臂运动过程中需采用的运动模式。
运动轨迹如图 6.45所示,其空间坐标图如图 6.46所示。
注意
本节仅根据运动轨迹示例说明示教再现时需采用的运动模式以及注意事项,不针对运动轨迹做详细描述。示教再现的方法请参见6.2 示教再现操作。
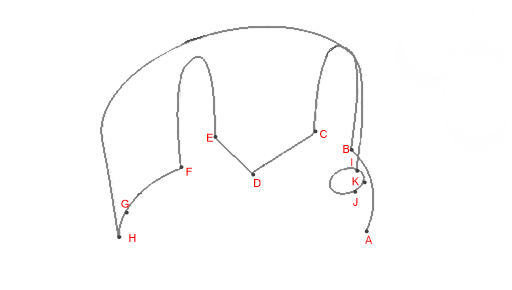
图 6.45 运动轨迹
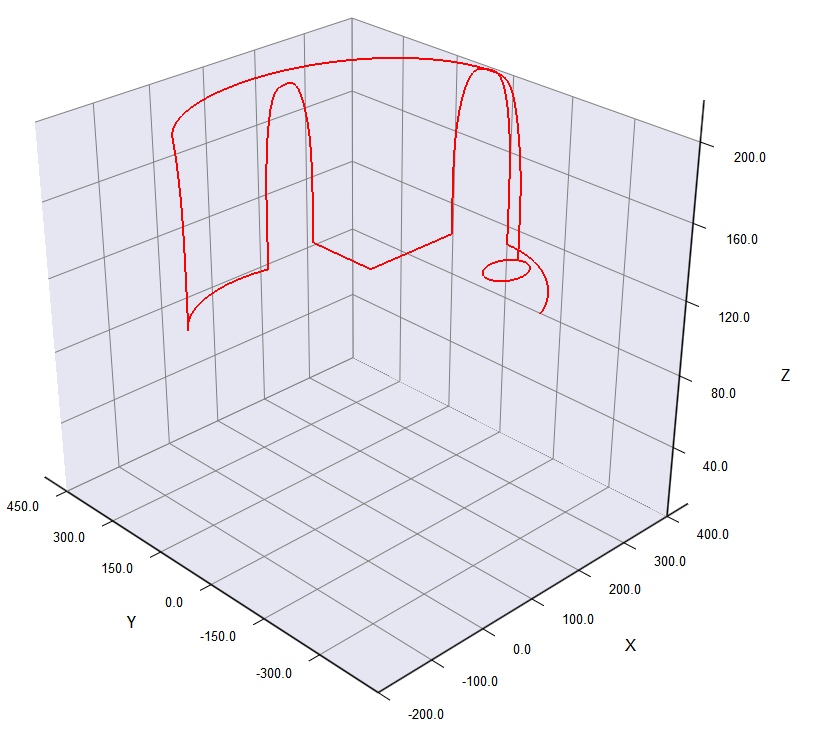
图 6.46 空间坐标
假设A点为起始点,J点为结束点,A点至J点的坐标如表 6.11所示。
表 6.11 空间坐标值
|
位置 |
坐标值(x,y,z,r) |
|
A |
(270,-244,110,0) |
|
B |
(400,0,110,0)(奇异点) |
|
C |
(366,111,110,0) |
|
D |
(194,111,110,0) |
|
E |
(194,277,110,0) |
|
F |
(85,250,110,0) |
|
G |
(-44.4458,239.5284,110,33.08)(圆弧中间点) |
|
H |
(-120.6913,164.5902,110,65.6601) |
|
I |
(372.225,-63.2786,110, -148.8402) |
|
K |
(351.7533,-113.7360,110, -160.2802)(圆中间点) |
|
J |
(323.1731,-115.7006,110, -170.5002) |
存点示例如图 6.47所示。
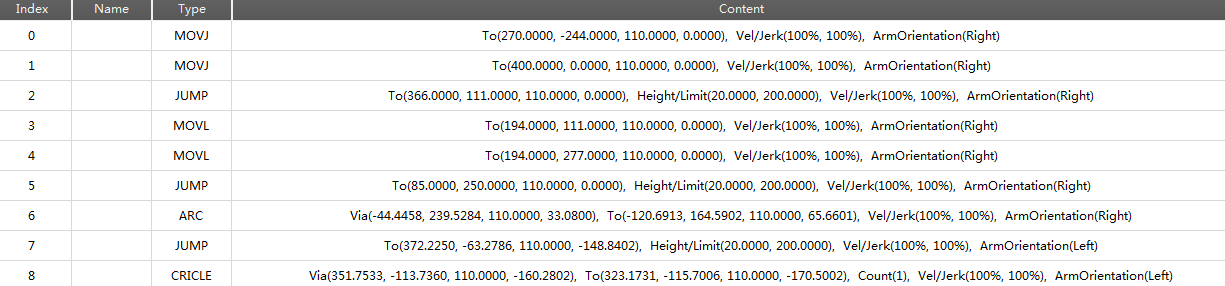
图 6.47 存点示例
AB段(0->1):运动轨迹为非直线,且B点为奇异点,则不能采用MOVL或ARC的运动模式,需采用MOVJ运动模式。奇异点说明请参见6.1.2 报警说明。
BC段(1->2):运动轨迹为门型,则采用JUMP运动模式。存点时还需在“Content”设置Height和Limit的高度。JUMP运动模式的运动轨迹和Height和Limit的高度有关,详细请参见2.3.4.2 点位模式(PTP)。
CD段(2->3):运动轨迹为直线,则采用MOVL运动模式。存点时需注意D点的臂方向需与C点的臂方向保持一致,否则会出现报警。
DE段(3->4):运动轨迹为直线,则采用MOVL运动模式。存点时需注意E点的臂方向需与D点的臂方向保持一致。
EF段(4->5):运动轨迹为门型,则采用JUMP运动模式。存点时还需设置Height和Limit的高度。
F-G-H段(5->6):运动轨迹为圆弧,则采用ARC运动模式。除了F、H点,还需存中间点G。ARC存点方法请参见6.1.3 ARC存点说明。存点时还需注意F点的臂方向需与G、H点的臂方向保持一致。
HI段(6->7):运动轨迹为门型,则采用JUMP运动模式。存点时需还需在“Content”设置Height和Limit的高度。
I-K-J段(7->8):运动轨迹为圆形,则采用CIRCLE运动模式。除了I、J点,还需存中间点K。存点方法与ARC存点方法相同。存点时还需注意I点的臂方向需与K、J点的臂方向保持一致,否则会出现报警。